ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.07.2024
Просмотров: 462
Скачиваний: 0
СОДЕРЖАНИЕ
1.2. Фундаментальные принципы управления
1.2.1. Принцип разомкнутого управления
Лекция 2.Статический режим сау
2.2. Статические характеристики
2.3. Статическое и астатическое регулирование
Лекция 3.Динамический режим сау
3.1. Динамический режим сау. Уравнение динамики
3.2. Линеаризация уравнения динамики
3.4. Элементарные динамические звенья
Лекция 4.Структурные схемы сау
4.1. Эквивалентные преобразования структурных схем
Лекция 5.Временные характеристики
5.1. Понятие временных характеристик
5.2. Переходные характеристики элементарных звеньев
5.2.1. Безынерционное (пропорциональное, усилительное) звено
5.2.2. Интегрирующее (астатическое) звено
5.2.3. Инерционное звено первого порядка (апериодическое)
5.2.4. Инерционные звенья второго порядка
Лекция 6.Частотные характеристики
6.1. Понятие частотных характеристик
6.2. Частотные характеристики типовых звеньев
6.2.4. Инерционные звенья второго порядка
6.2.5. Правила построения чх элементарных звеньев
7.1. Частотные характеристики разомкнутых одноконтурных сау
Лекция 8.Алгебраические критерии устойчивости
8.1. Понятие устойчивости системы
8.2. Алгебраические критерии устойчивости
8.2.1. Необходимое условие устойчивости
Лекция 9.Частотные критерии устойчивости
9.2. Критерий устойчивости Михайлова
9.3. Критерий устойчивости Найквиста
Лекция 10.D-разбиение. Запас устойчивости
10.1. Понятие структурной устойчивости. Афчх астатических сау
10.2. Понятие запаса устойчивости
10.3. Анализ устойчивости по лчх
11.1. Теоретическое обоснование метода d-разбиений
11.3. Прямые методы оценки качества управления
11.3.1. Оценка переходного процесса при ступенчатом воздействии.
11.3.2. Оценка качества управления при периодических возмущениях
Лекция 12.Корневой и интегральный методы оценки качества сау
12.1. Корневой метод оценки качества управления
12.2. Интегральные критерии качества
Лекция 13.Частотные методы оценки качества
13.1. Теоретическое обоснование
13.2. Основные соотношения между вчх и переходной характеристикой
14.1.1. Включение корректирующих устройств
14.1.2. Синтез корректирующих устройств.
14.2. Коррекция свойств сау изменением параметров звеньев
14.2.1. Изменение коэффициента передачи
14.2.2. Изменение постоянной времени звена сау
Лекция 15.Включение корректирующих звеньев
15.1. Коррекция свойств сау включением последовательных корректирующих звеньев
15.1.1. Включение интегрирующего звена в статическую сау
15.1.2. Включение апериодического звена
15.1.3. Включение форсирующего звена
15.1.4. Включение звена со сложной передаточной функцией
15.2. Последовательная коррекция по задающему воздействию
h(t) =
 =
A0W(0)
+
=
A0W(0)
+
![]() (jkw)
(jkw)![]() [Ak1cos(kwt)
+ Ak2sin(kwt)].
[Ak1cos(kwt)
+ Ak2sin(kwt)].
Преобразование этого выражения приводит к двум равнозначным формулам определения h(t)через составляющие ВЧХ:
 ;
;
 ,
,
где P(![]() )иQ(
)иQ(![]() )- вещественная и мнимая части АФЧХ
замкнутой САУ. Предпочтение обычно
оказывают первой формуле, хотя с
одинаковым успехом можно использовать
и вторую.
)- вещественная и мнимая части АФЧХ
замкнутой САУ. Предпочтение обычно
оказывают первой формуле, хотя с
одинаковым успехом можно использовать
и вторую.
Точно вычислить эти интегралы можно только с помощью ЭВМ, но в практике нашел широкое применение приближенный способ построения переходной характеристики на основе линейной аппроксимации ВЧХ замкнутой САУ, который называется метод трапеций. Прежде, чем рассматривать этот метод, рассмотрим без доказательства основные соотношения между ВЧХ замкнутой САУ и ее переходной характеристикой.
13.2. Основные соотношения между вчх и переходной характеристикой
1.Начальное
значение ВЧХ P(0) равно установившемуся
значению переходной характеристикиhуст =
![]() P(
P(![]() )
= P(0).
)
= P(0).
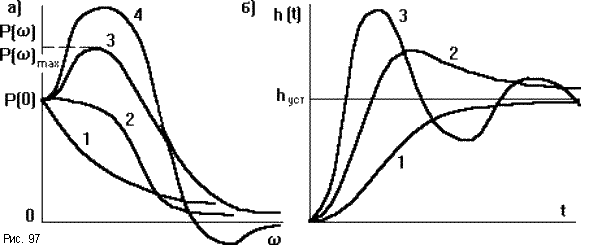
2.САУ с вогнутой ВЧХ (рис.97а кривая 1) не имеет перерегулирования, то есть ей соответствует монотонная переходная характеристика (рис.97б кривая 1).
3.САУ с трапециидальной ВЧХ (рис.97а кривая 2, такую ВЧХ можно аппроксимировать трапецией) имеетапериодическуюпереходную характеристику (рис.97б кривая 2), причем величина перерегулирования smaxне превышает 18%.
4.Кривые 3 и 4
на рис.97а соответствуют колебательной
переходной характеристике (рис.97б кривая
3). Величина перерегулированияsmaxтем больше, чем больше отношениеP(![]() )max/P(0).
Если это отношение стремится к
бесконечности, то есть имеет место
разрыв ВЧХ, то переходная характеристика
приобретает вид незатухающих колебаний
и САУ переходит на границу устойчивости.
Величину перерегулирования можно
приблизительно вычислить исходя из
соотношения
)max/P(0).
Если это отношение стремится к
бесконечности, то есть имеет место
разрыв ВЧХ, то переходная характеристика
приобретает вид незатухающих колебаний
и САУ переходит на границу устойчивости.
Величину перерегулирования можно
приблизительно вычислить исходя из
соотношения
smax
<
 .
.
Наличие отрицательного экстремума у ВЧХ (кривая 4) свидетельствует о повышенной колебательности системы.
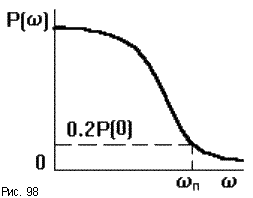
5.Время
переходного процессаtппможно оценить приблизительно по виду
ВЧХ без построения кривойh(t). Оно
определяется полосой частотwп,
при которых P(![]() )
> 0.2P(0)(рис.98).
)
> 0.2P(0)(рис.98).
![]() пназывают интервалом положительностиP(
пназывают интервалом положительностиP(![]() ).
При этом всегда tпп >p/
).
При этом всегда tпп >p/![]() п.
Для кривой 1 рис.97а:tпп
п.
Для кривой 1 рис.97а:tпп![]() 4
4![]() /
/![]() п.
Для кривой 2:tпп
п.
Для кривой 2:tпп![]()
![]() (1..4)4
(1..4)4![]() /
/![]() п.
Для кривых 3 и 4 коэффициент пропорциональности
больше, причем он тем больше, чем больше
отношениеP(
п.
Для кривых 3 и 4 коэффициент пропорциональности
больше, причем он тем больше, чем больше
отношениеP(![]() )max/P(0).
)max/P(0).
13.3. Метод трапеций
Этот метод основан на свойствах ВЧХ, следующих из полученной ранее формулы, которые мы рассмотрим без доказательств.
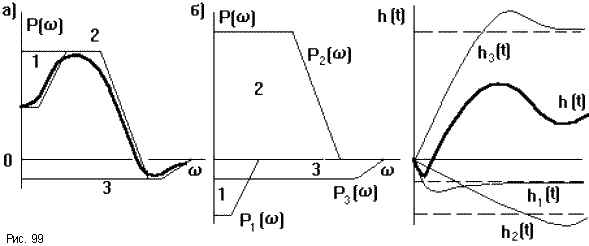
1.Свойство
линейности: если ВЧХ можно представить
суммойP(![]() )
=SPi(
)
=SPi(![]() ),
то каждой составляющейPi(
),
то каждой составляющейPi(![]() )будет соответствовать составляющая
переходной характеристики
)будет соответствовать составляющая
переходной характеристики
 ,
,
при этом h(t) =
![]() (рис.99а).
Поэтому, если ВЧХ имеет сложную форму,
ее можно представить суммой трапециидальных
ВЧХ, примыкающих к вертикальной оси.
Затем все трапеции перерисовывают,
перенося их основания на горизонтальную
ось (рис.99б). Каждой такой трапеции
соответствует своя составляющая
переходной характеристикиhi(t),
имеющая апериодический характер
(рис.99в).
(рис.99а).
Поэтому, если ВЧХ имеет сложную форму,
ее можно представить суммой трапециидальных
ВЧХ, примыкающих к вертикальной оси.
Затем все трапеции перерисовывают,
перенося их основания на горизонтальную
ось (рис.99б). Каждой такой трапеции
соответствует своя составляющая
переходной характеристикиhi(t),
имеющая апериодический характер
(рис.99в).
Результирующая кривая строится суммированием данных составляющих.
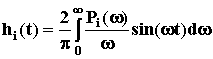
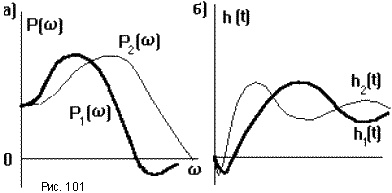
2.Если умножитьP(![]() )на постоянный множительа, то
соответствующая ей h(t) также умножается
наа. То есть, чем выше ВЧХ, тем выше
и переходная характеристика (рис.100).
)на постоянный множительа, то
соответствующая ей h(t) также умножается
наа. То есть, чем выше ВЧХ, тем выше
и переходная характеристика (рис.100).
3.Если аргумент
w в выражении ВЧХ P(![]() )
умножить на постоянный множитель а,
то аргумент вh(t) будет делиться на
это число, то есть
)
умножить на постоянный множитель а,
то аргумент вh(t) будет делиться на
это число, то есть
.
То есть переходный
процесс в случае P(a![]() )будет протекать вараз быстрее, чем
в случаеP(
)будет протекать вараз быстрее, чем
в случаеP(![]() )(рис.101).
)(рис.101).
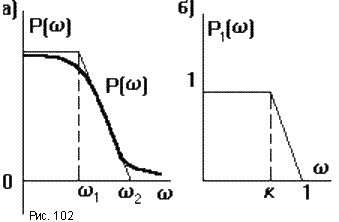
Рассмотрим
трапециидальную ВЧХ (рис.102а). Она
характеризуется коэффициентом наклона
k =
![]() 1
1![]() 2.
Подединичной трапецией(рис.102б)
понимают трапецию, две стороны которой
совпадают с осями координат и равны по
1 в соответствующих масштабах; наклонk может быть различным:P1(
2.
Подединичной трапецией(рис.102б)
понимают трапецию, две стороны которой
совпадают с осями координат и равны по
1 в соответствующих масштабах; наклонk может быть различным:P1(![]() )
=
)
= .
.
Подставляя это определение в выражение для определения h(t)можно вычислить кривую переходного процесса, соответствующую единичной трапециидальной ВЧХ. Эти расчеты были проделаны и составлены таблицыhk -функций.
Для любой
трапециидальной ВЧХ, на которые разбита
реальная ВЧХ (рис.99б), можно построить
подобную ей единичную трапецию со
значением k =
![]() 1
1![]() 2,
где
2,
где
![]() 1- частота, соответствующая перелому
реальной трапеции,
1- частота, соответствующая перелому
реальной трапеции,
![]() 2- основание трапеции реальной ВЧХ. Для
данной единичной трапеции по таблицеhk-функций
строят кривуюhk(k,t),
гдеt - время. Затем, используя свойства
2 и 3 масштабирования ВЧХ и переходной
характеристики строят кривую переходного
процесса, соответствующего данной
трапециидальной ВЧХ. Причем оба описанных
процесса можно совместить: сначала
задаются моментом времениt, для
него по таблице находят значение
hk(k,t),
потом умножают это значение на P(0)(масштабирование по вертикальной оси)
и откладывают полученное значение на
графикеh(t)для времениt = t/
2- основание трапеции реальной ВЧХ. Для
данной единичной трапеции по таблицеhk-функций
строят кривуюhk(k,t),
гдеt - время. Затем, используя свойства
2 и 3 масштабирования ВЧХ и переходной
характеристики строят кривую переходного
процесса, соответствующего данной
трапециидальной ВЧХ. Причем оба описанных
процесса можно совместить: сначала
задаются моментом времениt, для
него по таблице находят значение
hk(k,t),
потом умножают это значение на P(0)(масштабирование по вертикальной оси)
и откладывают полученное значение на
графикеh(t)для времениt = t/![]() 2(масштабирование по горизонтальной
оси). Строя таким образом точки для
различных моментов времени получают
кривую
2(масштабирование по горизонтальной
оси). Строя таким образом точки для
различных моментов времени получают
кривую
hi(t/![]() 2)
= P(0)
2)
= P(0)![]() hk(k,t).
hk(k,t).
Данный алгоритм удобно оформить в таблицу:
|
t |
hk(k,t) |
t
= t/ |
hi(t)
= P(0) |
|
..... |
..... |
..... |
..... |
После суммирования составляющих переходного процесса, соответствующих каждой трапеции, получают реальную характеристику h(t).
Описанный метод построения переходной характеристики называется методом трапеций.
Лекция 14.Синтез сау
14.1. Синтез сау
В ТАУ можно выделить две характерные задачи: 1) в заданной САУ найти и оценить переходные процессы - это задача анализа САУ; 2) по заданным переходным процессам и основным показателям разработать САУ - это задача синтеза САУ.
Вторая задача сложнее в виду своей неоднозначности, многое определяется творческими способностями проектировщика. Поэтому обычно задачу синтеза САУ ставится ограниченно. Считается, что основная часть системы уже задана, что обычно имеет место. Требуется синтезировать корректирующие звенья, то есть выбрать их схему и параметры. При этом необходимо, чтобы в результате коррекции САУ обеспечивался требуемый запас устойчивости; точность управления в установившихся режимах и качество управления в динамических режимах.