ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.07.2024
Просмотров: 482
Скачиваний: 0
СОДЕРЖАНИЕ
1.2. Фундаментальные принципы управления
1.2.1. Принцип разомкнутого управления
Лекция 2.Статический режим сау
2.2. Статические характеристики
2.3. Статическое и астатическое регулирование
Лекция 3.Динамический режим сау
3.1. Динамический режим сау. Уравнение динамики
3.2. Линеаризация уравнения динамики
3.4. Элементарные динамические звенья
Лекция 4.Структурные схемы сау
4.1. Эквивалентные преобразования структурных схем
Лекция 5.Временные характеристики
5.1. Понятие временных характеристик
5.2. Переходные характеристики элементарных звеньев
5.2.1. Безынерционное (пропорциональное, усилительное) звено
5.2.2. Интегрирующее (астатическое) звено
5.2.3. Инерционное звено первого порядка (апериодическое)
5.2.4. Инерционные звенья второго порядка
Лекция 6.Частотные характеристики
6.1. Понятие частотных характеристик
6.2. Частотные характеристики типовых звеньев
6.2.4. Инерционные звенья второго порядка
6.2.5. Правила построения чх элементарных звеньев
7.1. Частотные характеристики разомкнутых одноконтурных сау
Лекция 8.Алгебраические критерии устойчивости
8.1. Понятие устойчивости системы
8.2. Алгебраические критерии устойчивости
8.2.1. Необходимое условие устойчивости
Лекция 9.Частотные критерии устойчивости
9.2. Критерий устойчивости Михайлова
9.3. Критерий устойчивости Найквиста
Лекция 10.D-разбиение. Запас устойчивости
10.1. Понятие структурной устойчивости. Афчх астатических сау
10.2. Понятие запаса устойчивости
10.3. Анализ устойчивости по лчх
11.1. Теоретическое обоснование метода d-разбиений
11.3. Прямые методы оценки качества управления
11.3.1. Оценка переходного процесса при ступенчатом воздействии.
11.3.2. Оценка качества управления при периодических возмущениях
Лекция 12.Корневой и интегральный методы оценки качества сау
12.1. Корневой метод оценки качества управления
12.2. Интегральные критерии качества
Лекция 13.Частотные методы оценки качества
13.1. Теоретическое обоснование
13.2. Основные соотношения между вчх и переходной характеристикой
14.1.1. Включение корректирующих устройств
14.1.2. Синтез корректирующих устройств.
14.2. Коррекция свойств сау изменением параметров звеньев
14.2.1. Изменение коэффициента передачи
14.2.2. Изменение постоянной времени звена сау
Лекция 15.Включение корректирующих звеньев
15.1. Коррекция свойств сау включением последовательных корректирующих звеньев
15.1.1. Включение интегрирующего звена в статическую сау
15.1.2. Включение апериодического звена
15.1.3. Включение форсирующего звена
15.1.4. Включение звена со сложной передаточной функцией
15.2. Последовательная коррекция по задающему воздействию
Лекция 4.Структурные схемы сау
4.1. Эквивалентные преобразования структурных схем
Структурная схема САУ в простейшем случае строится из элементарных динамических звеньев. Но несколько элементарных звеньев могут быть заменены одним звеном со сложной передаточной функцией. Для этого существуют правила эквивалентного преобразования структурных схем. Рассмотрим возможные способы преобразований.

1. Последовательное соединение (рис.28) - выходная величина предшествующего звена подается на вход последующего.
При этом можно записать:
y1
= W1![]() yo;
y2
= W2
yo;
y2
= W2![]() y1;
...; yn
= Wn
y1;
...; yn
= Wn![]() yn
- 1
= >
yn
- 1
= >
yn
= W1![]() W2.....Wn.yo
= Wэкв
W2.....Wn.yo
= Wэкв![]() yo,
yo,
где .
.
То есть цепочка последовательно соединенных звеньев преобразуется в эквивалентное звено с передаточной функцией, равной произведению передаточных функций отдельных звеньев.
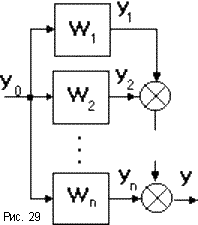
2. Параллельно - согласное соединение (рис.29) - на вход каждого звена подается один и тот же сигнал, а выходные сигналы складываются. Тогда:
y = y1
+ y2
+ ... + yn
= (W1
+ W2
+ ... + W3)yo
= Wэкв![]() yo,
yo,
где
 .
.
То есть цепочка звеньев, соединенных параллельно - согласно, преобразуется в звено с передаточной функцией, равной сумме передаточных функций отдельных звеньев.
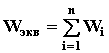
3. Прараллельно - встречное соединение (рис. 30а) - звено охвачено положительной или отрицательной обратной связью. Участок цепи, по которому сигнал идет в противоположном направлении по отношению к системе в целом (то есть с выхода на вход) называется цепью обратной связи с передаточной функцией Wос. При этом для отрицательной ОС:
y = Wпu; y1 = Wосy; u = yo - y1,
следовательно
y = Wпyo - Wпy1 = Wпyo - WпWocy = >
y(1 + WпWoc) = Wпyo = > y = Wэквyo,
где
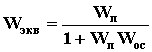 .
.
Аналогично:
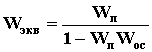 - для положительной ОС.
- для положительной ОС.
Если Woc = 1, то обратная связь называется единичной (рис.30б), тогда Wэкв = Wп /(1 ± Wп).
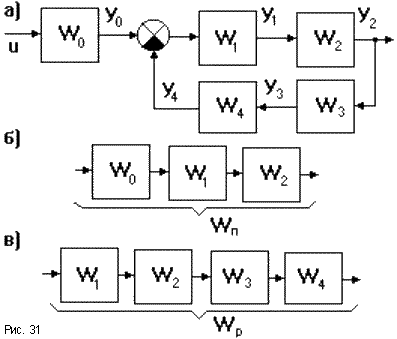
Замкнутую систему
называют одноконтурной,
если при ее размыкании в какой либо
точке получают цепочку из последовательно
соединенных элементов (рис.31а). Участок
цепи, состоящий из последовательно
соединенных звеньев, соединяющий точку
приложения входного сигнала с точкой
съема выходного сигнала называется
прямой цепью
(рис.31б, передаточная функция прямой
цепи Wп
= Wo![]() W1
W1![]() W2).
Цепь из последовательно соединенных
звеньев, входящих в замкнутый контур
называют разомкнутой
цепью
(рис.46в, передаточная функция разомкнутой
цепи Wp
= W1
W2).
Цепь из последовательно соединенных
звеньев, входящих в замкнутый контур
называют разомкнутой
цепью
(рис.46в, передаточная функция разомкнутой
цепи Wp
= W1![]() W2
W2![]() W3
W3![]() W4).
Исходя из приведенных выше способов
эквивалентного преобразования структурных
схем, одноконтурная система может быть
представлена одним звеном с передаточной
функцией: Wэкв
= Wп/(1
± Wp)
- передаточная функция одноконтурной
замкнутой системы с отрицательной ОС
равна передаточной функции прямой цепи,
деленной на единицу плюс передаточная
функция разомкнутой цепи. Для положительной
ОС в знаменателе знак минус. Если сменить
точку снятия выходного сигнала, то
меняется вид прямой цепи. Так, если
считать выходным сигнал
y1
на выходе звена W1,
то Wp
= Wo
W4).
Исходя из приведенных выше способов
эквивалентного преобразования структурных
схем, одноконтурная система может быть
представлена одним звеном с передаточной
функцией: Wэкв
= Wп/(1
± Wp)
- передаточная функция одноконтурной
замкнутой системы с отрицательной ОС
равна передаточной функции прямой цепи,
деленной на единицу плюс передаточная
функция разомкнутой цепи. Для положительной
ОС в знаменателе знак минус. Если сменить
точку снятия выходного сигнала, то
меняется вид прямой цепи. Так, если
считать выходным сигнал
y1
на выходе звена W1,
то Wp
= Wo![]() W1.
Выражение для передаточной функции
разомкнутой цепи не зависит от точки
снятия выходного сигнала.
W1.
Выражение для передаточной функции
разомкнутой цепи не зависит от точки
снятия выходного сигнала.

Замкнутые системы бывают одноконтурными и многоконтурной (рис.32).Чтобы найти эквивалентную передаточную функцию для данной схемы нужно сначала осуществить преобразование отдельных участков.
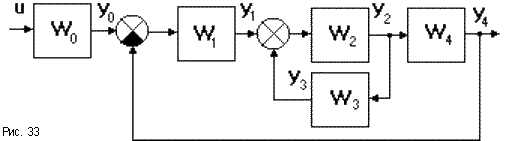
Если многоконтурная система имеет перекрещивающиеся связи (рис.33), то для вычисления эквивалентной передаточной функции нужны дополнительные правила:
4. При переносе сумматора через звено по ходу сигнала необходимо добавить звено с передаточной функцией того звена, через которое переносится сумматор. Если сумматор переносится против хода сигнала, то добавляется звено с передаточной функцией, обратной передаточной функции звена, через которое переносим сумматор (рис.34).

Так с выхода системы на рис.34а снимается сигнал
y2 = (f + yoW1)W2.
Такой же сигнал должен сниматься с выходов систем на рис.34б:
y2 = fW2 + yoW1W2 = (f + yoW1)W2,
и на рис.34в:
y2 = (f(1/W1) + yo)W1W2 = (f + yoW1)W2.
При подобных преобразованиях могут возникать неэквивалентные участки линии связи (на рисунках они заштрихованы).

5. При переносе узла через звено по ходу сигнала добавляется звено с передаточной функцией, обратной передаточной функции звена, через которое переносим узел. Если узел переносится против хода сигнала, то добавляется звено с передаточной функцией звена, через которое переносится узел (рис.35).
Так с выхода системы на рис.35а снимается сигнал
y1 = yoW1.
Такой же сигнал снимается с выходов рис.35б:
y1 = yoW1W2/W2 = yoW1
и рис.35в:
y1 = yoW1.
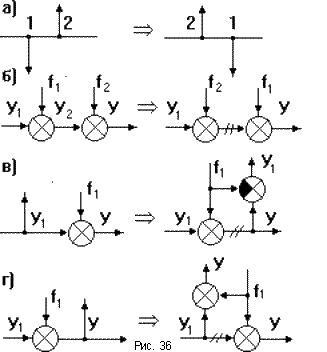
6. Возможны взаимные перестановки узлов и сумматоров: узлы можно менять местами (рис. 36а); сумматоры тоже можно менять местами (рис.36б); при переносе узла через сумматор необходимо добавить сравнивающий элемент (рис.36в: y = y1 + f1 = > y1 = y - f1) или сумматор (рис.36г: y = y1 + f1).
Во всех случаях переноса элементов структурной схемы возникают неэквивалентные участки линии связи, поэтому надо быть осторожным в местах съема выходного сигнала.
При эквивалентных преобразованиях одной и той же структурной схемы могут быть получены различные передаточные функции системы по разным входам и выходам. Так на рис.48 имеется два входа: по управляющему воздействию u и возмущению f при одном выходе y. Такая схема может быть преобразована к одному звену с двумя передаточными функциями Wuy и Wfy.
Лекция 5.Временные характеристики
5.1. Понятие временных характеристик
Для оценки динамических свойств системы и отдельных звеньев принято исследовать их реакцию на типовые входные воздействия, которые наиболее полно отражают особенности реальных возмущений. Во - первых, это позволяет сравнивать отдельные элементы между собой с точки зрения их динамических свойств. Во - вторых, зная реакцию системы на типовые воздействия, можно судить о том, как она будет вести себя при сложных изменениях входной величины.
Наиболее распространенными типовыми воздействиями являются: ступенчатое, импульсноеигармоническое воздействия. Любой сигналu(t), имеющий сложную форму, можно разложить на сумму типовых воздействийui(t)и исследовать реакцию системы на каждую из составляющих, а затем, пользуясь принципом суперпозиции, получить результирующее изменение выходной величиныy(t)суммируя полученные таким образом составляющие выходного сигналаyi(t).
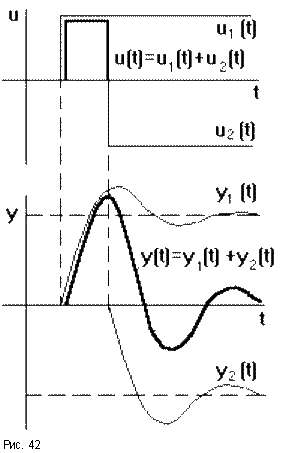
Особенно важное
значение в ТАУ придают ступенчатому
воздействию 1(t) =
 .
Все остальные воздействия могут быть
сведены к нему. Так, например, реальный
импульсный сигнал может быть представлен
двумя ступенчатыми сигналами одинаковой
величины, но противоположными по знаку,
поданными один за другим через интервал
времени
.
Все остальные воздействия могут быть
сведены к нему. Так, например, реальный
импульсный сигнал может быть представлен
двумя ступенчатыми сигналами одинаковой
величины, но противоположными по знаку,
поданными один за другим через интервал
времени![]() t(рис.42).
t(рис.42).
Зависимость изменения выходной величины системы от времени при подаче на ее вход единичного ступенчатого воздействия при нулевых начальных условиях называется переходной характеристикойи обозначаетсяh(t).
Не менее важное
значение в ТАУ уделяется импульсной
переходной характеристике, которая
описывает реакцию системы на единичное
импульсное воздействие при нулевых
начальных условиях, обозначают![]() (t).
Единичный импульс физически представляет
из себя очень узкий импульс, ширина
которого стремится к нулю, а высота - к
бесконечности, ограничивающий единичную
площадь. Математически он описывается
дельта - функциейd(t) = 1’(t).
(t).
Единичный импульс физически представляет
из себя очень узкий импульс, ширина
которого стремится к нулю, а высота - к
бесконечности, ограничивающий единичную
площадь. Математически он описывается
дельта - функциейd(t) = 1’(t).
Переходная и импульсная переходная характеристики называются временными характеристиками. Каждая из них является исчерпывающей характеристиками системы и любого ее звена при нулевых начальных условиях. По ним можно однозначно определить выходную величину при произвольном входном воздействии.