ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.07.2024
Просмотров: 450
Скачиваний: 0
СОДЕРЖАНИЕ
1.2. Фундаментальные принципы управления
1.2.1. Принцип разомкнутого управления
Лекция 2.Статический режим сау
2.2. Статические характеристики
2.3. Статическое и астатическое регулирование
Лекция 3.Динамический режим сау
3.1. Динамический режим сау. Уравнение динамики
3.2. Линеаризация уравнения динамики
3.4. Элементарные динамические звенья
Лекция 4.Структурные схемы сау
4.1. Эквивалентные преобразования структурных схем
Лекция 5.Временные характеристики
5.1. Понятие временных характеристик
5.2. Переходные характеристики элементарных звеньев
5.2.1. Безынерционное (пропорциональное, усилительное) звено
5.2.2. Интегрирующее (астатическое) звено
5.2.3. Инерционное звено первого порядка (апериодическое)
5.2.4. Инерционные звенья второго порядка
Лекция 6.Частотные характеристики
6.1. Понятие частотных характеристик
6.2. Частотные характеристики типовых звеньев
6.2.4. Инерционные звенья второго порядка
6.2.5. Правила построения чх элементарных звеньев
7.1. Частотные характеристики разомкнутых одноконтурных сау
Лекция 8.Алгебраические критерии устойчивости
8.1. Понятие устойчивости системы
8.2. Алгебраические критерии устойчивости
8.2.1. Необходимое условие устойчивости
Лекция 9.Частотные критерии устойчивости
9.2. Критерий устойчивости Михайлова
9.3. Критерий устойчивости Найквиста
Лекция 10.D-разбиение. Запас устойчивости
10.1. Понятие структурной устойчивости. Афчх астатических сау
10.2. Понятие запаса устойчивости
10.3. Анализ устойчивости по лчх
11.1. Теоретическое обоснование метода d-разбиений
11.3. Прямые методы оценки качества управления
11.3.1. Оценка переходного процесса при ступенчатом воздействии.
11.3.2. Оценка качества управления при периодических возмущениях
Лекция 12.Корневой и интегральный методы оценки качества сау
12.1. Корневой метод оценки качества управления
12.2. Интегральные критерии качества
Лекция 13.Частотные методы оценки качества
13.1. Теоретическое обоснование
13.2. Основные соотношения между вчх и переходной характеристикой
14.1.1. Включение корректирующих устройств
14.1.2. Синтез корректирующих устройств.
14.2. Коррекция свойств сау изменением параметров звеньев
14.2.1. Изменение коэффициента передачи
14.2.2. Изменение постоянной времени звена сау
Лекция 15.Включение корректирующих звеньев
15.1. Коррекция свойств сау включением последовательных корректирующих звеньев
15.1.1. Включение интегрирующего звена в статическую сау
15.1.2. Включение апериодического звена
15.1.3. Включение форсирующего звена
15.1.4. Включение звена со сложной передаточной функцией
15.2. Последовательная коррекция по задающему воздействию
3.Перерегулирование- это максимальное
отклонение управляемой величины от
установившегося значения, выраженное
в относительных единицах:
= .
Здесьhmax1- значение первого максимума переходной
характеристики. При больших
перерегулированиях могут возникнуть
значительные динамические усилия в
механической части системы, электрические
перенапряжения и т.п. Допустимое значениеs определяется из опыта эксплуатации.
обычно оно составляет 0.1...0.3, иногда
допускается до 0.7.
.
Здесьhmax1- значение первого максимума переходной
характеристики. При больших
перерегулированиях могут возникнуть
значительные динамические усилия в
механической части системы, электрические
перенапряжения и т.п. Допустимое значениеs определяется из опыта эксплуатации.
обычно оно составляет 0.1...0.3, иногда
допускается до 0.7.
4.Частота
колебаний
![]() =
2
=
2![]() /T,
где T- период колебаний.
/T,
где T- период колебаний.
5.Число колебаний nза времяtпп.
6. Декремент
затуханияk, равный отношению двух
смежных перерегулирований: .
.
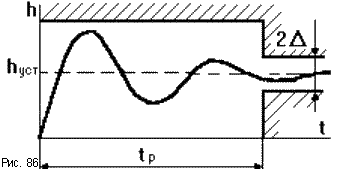
При создании САУ допустимые значения показателей качества оговариваются техническими условиями, что можно представить в виде диаграммы показателей качества. Это область, за границы которой не должна выходить переходная характеристика (рис.86).
11.3.2. Оценка качества управления при периодических возмущениях
Периодические возмущения можно разложить в ряд Фурье, поэтому их воздействие удобно анализировать по частотным характеристикам, показывающим, как звено преобразует гармонический сигнал.
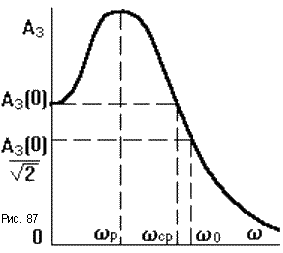
Обычно используют
АЧХ замкнутой САУ (рис.87), которую легко
построить по АФЧХ разомкнутой САУ
Wp(j![]() ),
по формуле
),
по формуле
Aз =
 .
.
По этой кривой можно получить ряд показателей качества.
1.Показатель
колебательностиM- это отношение
максимального значения АЧХ замкнутой
САУ к ее значению при
![]() =
0, то естьM = Aзmax(
=
0, то естьM = Aзmax(![]() )/Aз(0).
Так как
)/Aз(0).
Так как
Aз(0) =
![]() 1,
1,
при Kp
>> 1, то M
![]() Aзmax(
Aзmax(![]() ).
Он характеризует склонность системы к
колебаниям и не должен превышать 1.5.
).
Он характеризует склонность системы к
колебаниям и не должен превышать 1.5.
2. Резонансная
частота системы
![]() p- это частота, при которой колебания
проходят через систему с наибольшим
усилением, а АЧХ достигает максимума.
p- это частота, при которой колебания
проходят через систему с наибольшим
усилением, а АЧХ достигает максимума.
3.Полоса
пропускания системы - это интервал
частот от
![]() =
0до=
=
0до=
![]() 0,
на котором выполняется условиеAз(
0,
на котором выполняется условиеAз(![]() 0)
0)![]()
![]()
![]() 0.707.
Если она высокая, то система будет
воспроизводить высокочастотные помехи.
0.707.
Если она высокая, то система будет
воспроизводить высокочастотные помехи.
4.Частота
среза
![]() ср- при которой АЧХ замкнутой САУ принимает
значение, равное единице. По ней можно
судить о длительности переходного
процессаtпп
ср- при которой АЧХ замкнутой САУ принимает
значение, равное единице. По ней можно
судить о длительности переходного
процессаtпп![]() (1..2)2
(1..2)2![]() /
/![]() ср.
ср.
5.Склонность САУ к колебаниям характеризуют также ее запасы устойчивости по модулю (допускается от 6 до 20дб) и по фазе (допускается от 30 до 60 градусов).
Лекция 12.Корневой и интегральный методы оценки качества сау
12.1. Корневой метод оценки качества управления
Это косвенный метод, основанный на определении границ области расположения корней характеристического уравнения на комплексной плоскости, что дает возможность приблизительно оценить качество управления.
Пусть имеется дифференциальное уравнение замкнутой САУ:
(a0pn + a1pn-1 + a2pn-2 + ... + (an)y = (b0pm + b1pm-1 + ... + bm)u.
Передаточная функция САУ
 ,
,
где p~1,p~2,...,p~m- нули передаточной функции,p1,p2,...,pn- полюса передаточной функции.
 Переходный
процесс зависит как от полюсов, так и
от нулей, то есть определяется как левой,
так и правой частями дифференциального
уравнения. Это существенно усложняет
анализ. Поэтому рассмотрим частный, но
весьма распространенный случай, когда
передаточная функция замкнутой САУ не
имеет нулей:
Переходный
процесс зависит как от полюсов, так и
от нулей, то есть определяется как левой,
так и правой частями дифференциального
уравнения. Это существенно усложняет
анализ. Поэтому рассмотрим частный, но
весьма распространенный случай, когда
передаточная функция замкнутой САУ не
имеет нулей:
 .
.
Тогда уравнение динамики приобретает вид:
(a0pn + a1pn-1 + a2pn-2 + ... + an)y = b0u.
Общее решение данного уравнения имеет вид:
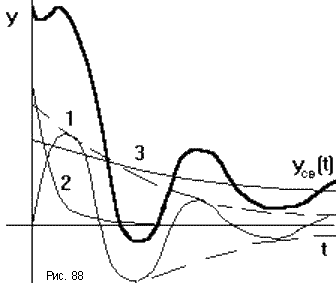
y(t) = yсв + yвын = åAiepit + bо/an.
Время переходного процесса tппопределяется длительностью свободного процесса, который представляет собой суммуnэкспоненциально затухающих составляющих (рис.88). Затухание каждой из составляющих определяется вещественной частью соответствующего плюса pi, которая для устойчивых систем должна быть отрицательна. Длительность переходного процесса определяется в основном свободной составляющей, имеющей наименьшее затухание, то есть наименьшее абсолютное значение вещественной части соответствующего полюса.
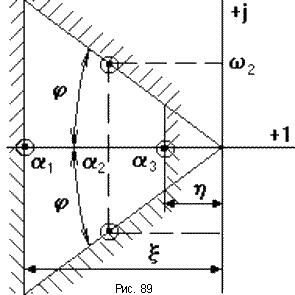
Если изобразить все полюса в комплексной плоскости корней (рис.89), то данный полюс (или пара комплексно сопряженных полюсов) будет наиболее близко расположен к мнимой оси.
Для приблизительной оценки качества САУ на плоскости корней выделяется область в виде трапеции, на сторонах которой находится хотя бы по одному корню, все остальные корни - внутри данной области. Эта область характеризуется параметрами: h-степень устойчивости(равна расстоянию от мнимой оси до ближайшего корня или пары комплексно сопряженных корней); m = tg(j)-колебательность(характеризует колебательность переходного процесса и величину перерегулирования); x- своего названия не имеет, равна вещественной части наиболее удаленного от мнимой оси корня.
По степени
устойчивости hможно приблизительно
вычислить время переходного процесса,
которое определяется по моменту, когда
свободная составляющая с наименьшим
затуханием уменьшится до величины
![]()
![]() Ai
, гдеAi- начальное значение данной составляющей,
то на рис.84:
Ai
, гдеAi- начальное значение данной составляющей,
то на рис.84:
yсв3(t)
= A3
![]() =
=![]()
![]() A3
= >
A3
= >
 .
.
В общем случае, когда передаточная функция замкнутой САУ имеет нули, то использование данного метода может дать большую ошибку. Однако всегда качество управления будет тем лучше, чем больше hи меньшеm, поэтому данный метод имеет смысл для любых САУ, но приближенно.
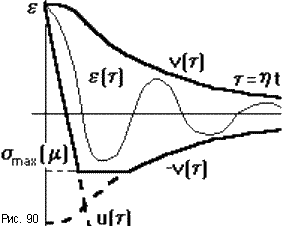
Зная значения h,
x, mможно оценить область, за которую
кривая переходного процесса выходить
не будет (рис.90). Для этого строятся две
кривые:u(t,h)- миноранта иv(t,h)-
мажоранта, ограничивающая кривую
переходного процесса соответственно
снизу и сверху так, чтоu(t,h)![]() e(t)
e(t)![]() v(t,h),
гдеe(t) = yo-y(t).
Формулы для определения миноранты и
мажоранты берутся в справочниках для
конкретных случаев.
v(t,h),
гдеe(t) = yo-y(t).
Формулы для определения миноранты и
мажоранты берутся в справочниках для
конкретных случаев.