ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.07.2024
Просмотров: 497
Скачиваний: 0
СОДЕРЖАНИЕ
1.2. Фундаментальные принципы управления
1.2.1. Принцип разомкнутого управления
Лекция 2.Статический режим сау
2.2. Статические характеристики
2.3. Статическое и астатическое регулирование
Лекция 3.Динамический режим сау
3.1. Динамический режим сау. Уравнение динамики
3.2. Линеаризация уравнения динамики
3.4. Элементарные динамические звенья
Лекция 4.Структурные схемы сау
4.1. Эквивалентные преобразования структурных схем
Лекция 5.Временные характеристики
5.1. Понятие временных характеристик
5.2. Переходные характеристики элементарных звеньев
5.2.1. Безынерционное (пропорциональное, усилительное) звено
5.2.2. Интегрирующее (астатическое) звено
5.2.3. Инерционное звено первого порядка (апериодическое)
5.2.4. Инерционные звенья второго порядка
Лекция 6.Частотные характеристики
6.1. Понятие частотных характеристик
6.2. Частотные характеристики типовых звеньев
6.2.4. Инерционные звенья второго порядка
6.2.5. Правила построения чх элементарных звеньев
7.1. Частотные характеристики разомкнутых одноконтурных сау
Лекция 8.Алгебраические критерии устойчивости
8.1. Понятие устойчивости системы
8.2. Алгебраические критерии устойчивости
8.2.1. Необходимое условие устойчивости
Лекция 9.Частотные критерии устойчивости
9.2. Критерий устойчивости Михайлова
9.3. Критерий устойчивости Найквиста
Лекция 10.D-разбиение. Запас устойчивости
10.1. Понятие структурной устойчивости. Афчх астатических сау
10.2. Понятие запаса устойчивости
10.3. Анализ устойчивости по лчх
11.1. Теоретическое обоснование метода d-разбиений
11.3. Прямые методы оценки качества управления
11.3.1. Оценка переходного процесса при ступенчатом воздействии.
11.3.2. Оценка качества управления при периодических возмущениях
Лекция 12.Корневой и интегральный методы оценки качества сау
12.1. Корневой метод оценки качества управления
12.2. Интегральные критерии качества
Лекция 13.Частотные методы оценки качества
13.1. Теоретическое обоснование
13.2. Основные соотношения между вчх и переходной характеристикой
14.1.1. Включение корректирующих устройств
14.1.2. Синтез корректирующих устройств.
14.2. Коррекция свойств сау изменением параметров звеньев
14.2.1. Изменение коэффициента передачи
14.2.2. Изменение постоянной времени звена сау
Лекция 15.Включение корректирующих звеньев
15.1. Коррекция свойств сау включением последовательных корректирующих звеньев
15.1.1. Включение интегрирующего звена в статическую сау
15.1.2. Включение апериодического звена
15.1.3. Включение форсирующего звена
15.1.4. Включение звена со сложной передаточной функцией
15.2. Последовательная коррекция по задающему воздействию
Dн(p) = pn + cн1 pn -1 + cн2 pn -2 + ... + cнn = 0.
Э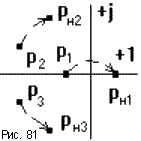 то
уже другое уравнение и оно также имеет
единственное решение(pн1
,pн2
,...,pнn
), отличающееся от(p1
,p2
,...,pn
). Если плавно менять значение параметра
САУ, то коэффициенты уравнения тоже
будут плавно изменяться, а его корни
будут перемещаться по комплексной
плоскости (рис.81).
то
уже другое уравнение и оно также имеет
единственное решение(pн1
,pн2
,...,pнn
), отличающееся от(p1
,p2
,...,pn
). Если плавно менять значение параметра
САУ, то коэффициенты уравнения тоже
будут плавно изменяться, а его корни
будут перемещаться по комплексной
плоскости (рис.81).
Каждый уникальный
набору коэффициентов c1
,c2
,...,cn
можно изобразить точкой в
пространстве коэффициентов, по осям
которого откладываются значения
коэффициентовc1
,c2
,...,cn
. Так уравнению третьей степени
соответствует трехмерное пространство
коэффициентов (рис.82).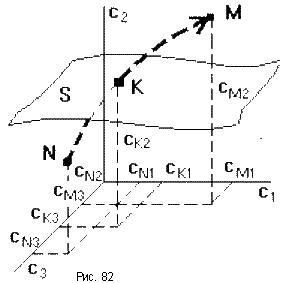
Пусть точка Nс координатами(cN1 ,cN2,cN3)соответствует уравнению, имеющему решение(pN1,pN2,pN3), точка M с координатами(cM1 ,cM2 ,cM3)соответствует уравнению, имеющему решение(pM1 ,pM2 ,pM3). При изменении какого-либо параметра САУ коэффициенты характеристического уравнения будут изменяться, при этом точка в пространстве коэффициентов, соответствующая данному уравнению будет перемещаться по некоторой траектории, например из положенияNв положениеM. Этому перемещению будет соответствовать и перемещение корней(pN1,pN2,pN3)на комплексной плоскости в положение(pM1 ,pM2 ,pM3)(аналогично рис.81).
При этом движении
некоторые корни будут переходить через
мнимую ось комплексной плоскости из
левой полуплоскости в правую и наоборот.
В момент перехода такой k-й корень
примет значениеpK
= j![]() K,
а коэффициенты уравнения будут иметь
определенные значенияcK1,cK2,cK3,
определяющие в пространстве коэффициентов
точкуK. Подставим кореньpKв характеристическое уравнение, получим
тождество:
K,
а коэффициенты уравнения будут иметь
определенные значенияcK1,cK2,cK3,
определяющие в пространстве коэффициентов
точкуK. Подставим кореньpKв характеристическое уравнение, получим
тождество:
D(pK
) = (j![]() K)3
+ cK1(j
K)3
+ cK1(j![]() K)2
+ cK2
(jK ) + cK3
= 0
K)2
+ cK2
(jK ) + cK3
= 0
Меняя w от -![]() до +
до +![]() ,
и находя при каждой частоте все возможные
сочетания коэффициентовc1
,c2
,...,cn, удовлетворяющих уравнению
,
и находя при каждой частоте все возможные
сочетания коэффициентовc1
,c2
,...,cn, удовлетворяющих уравнению
D(j![]() )
= (j
)
= (j![]() )n
+ c1
(j
)n
+ c1
(j![]() )n-1
+ c2
(j
)n-1
+ c2
(j![]() )n-2
+ ... + cn
= 0,
)n-2
+ ... + cn
= 0,
можно построить в n-мерном пространстве коэффициентов сложную поверхностьS, разделяющую его на области, называемоеD-областями. Полученное уравнение называетсяуравнением границы D-разбиения.
Переход из одной D-области в другую через поверхностьSсоответствует переходу одного или нескольких корней через мнимую ось в плоскости корней. То есть каждая точка внутри определеннойD-области соответствует уравнению с определенным количеством левых и правых корней. Поэтому области обозначаютD(m)по числу m правых корней.
Достаточно взять любую точку в пространстве коэффициентов и найти для нее число правых корней. Затем, двигаясь по пространству коэффициентов через границу S, можно выявить обозначения всех других областей. Особый интерес представляет областьD(0), которой соответствуют уравнения с полным отсутствием правых корней, называемаяобластью устойчивости. Описанный метод определения областей устойчивости называетсяметодом D-разбиений.
Не обязательно строить сложную n-мерную картинуD-разбиения, можно изменять значения, например, только двух коэффициентов, оставляя другие коэффициенты постоянными. ГраницуD-разбиенияSможно строить не только также и в пространстве конкретных параметров системы, от которых зависят данные коэффициенты.
11.2. D-разбиение по одному параметру
Пусть необходимо
выявить влияние на устойчивоять САУ,
например, коэффициента усиления K.
Приведем характеристическое уравнение
к видуD(p) = S(p) + K![]() N(p),
выделив члены, не зависящие от Kв
полиномS(p), а в остальных членах,
линейно зависящих отK, вынесем его
за скобки. ГраницаD-разбиения
задается уравнением
N(p),
выделив члены, не зависящие от Kв
полиномS(p), а в остальных членах,
линейно зависящих отK, вынесем его
за скобки. ГраницаD-разбиения
задается уравнением
D(j![]() )
= S(j
)
= S(j![]() )
+ K
)
+ K![]() N(j
N(j![]() )
= 0, => K = -S(j
)
= 0, => K = -S(j![]() )/N(j
)/N(j![]() )
= X(
)
= X(![]() )
+ jY(
)
+ jY(![]() ).
).
Изменяя w от -![]() до +
до +![]() ,
будем вычислятьX(
,
будем вычислятьX(![]() )иY(
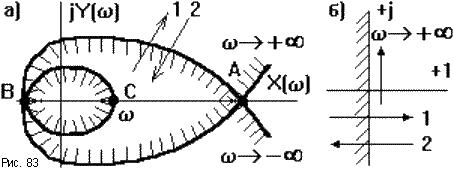
)иY(![]() )и по ним строить точки границыD-разбиения.
Пространство коэффициентов представляется
системой координатX-Y(рис.83а). Обычно
строят только половину кривой (
)и по ним строить точки границыD-разбиения.
Пространство коэффициентов представляется
системой координатX-Y(рис.83а). Обычно
строят только половину кривой (![]() = [0, +
= [0, +![]() ),
другую половину достраивают симметрично
относительно вещественной оси.
),
другую половину достраивают симметрично
относительно вещественной оси.
Если в плоскости
корней двигаться вдоль мнимой оси от
-![]() до +
до +![]() и
штриховать ее слева (рис.83б), то это будет
соответствовать движению вдоль линииD-разбиения при изменении w от -
и
штриховать ее слева (рис.83б), то это будет
соответствовать движению вдоль линииD-разбиения при изменении w от -![]() до +
до +![]() и
штриховке ее также слева. Переходу корня
в плоскости корней из штрихованной
полуплоскости в нештрихованную вдоль
стрелки 1соответствует аналогичный
переход через границуD-разбиения
вдоль стрелки1, и наоборот. Если
пересекается область с двойной штриховкой
(точкиA, В, C), то в плоскости корней
мнимую ось пересекает пара комплексно
сопряженных корней.
и
штриховке ее также слева. Переходу корня
в плоскости корней из штрихованной
полуплоскости в нештрихованную вдоль
стрелки 1соответствует аналогичный
переход через границуD-разбиения
вдоль стрелки1, и наоборот. Если
пересекается область с двойной штриховкой
(точкиA, В, C), то в плоскости корней
мнимую ось пересекает пара комплексно
сопряженных корней.
Если известно количество правых корней, соответствующее хотя бы одной D-области, то двигаясь от нее через границы с учетом штриховок, можно обозначить все остальные области. Область с наибольшим количеством штриховок является претендентом на область устойчивости. Нужно взять любую точку из этой области и при соответствующем значенииKпроверить систему на устойчивость любым методом.
Есть одна особенность.
Так как K- вещественное число, тоY(![]() )
= 0,поэтому нас интересует не вся
область устойчивости, а лишь отрезок
вещественной оси в этой области, то естьK = X(
)
= 0,поэтому нас интересует не вся
область устойчивости, а лишь отрезок
вещественной оси в этой области, то естьK = X(![]() ).
).
11.3. Прямые методы оценки качества управления
Устойчивость САУ является необходимым, но не достаточным условием для ее эффективного функционирования. Важное значение имеет качество управления, то есть степень удовлетворения совокупности требований к форме кривой переходного процесса, которая определяет пригодность системы для конкретных условий работы.
Для сравнения качества различных САУ исследуется их реакция на типовые воздействия. Обычно это ступенчатая (толчковая) функция, как один из наиболее неблагоприятных видов возмущений. Для систем, работающих с периодическими возмущениями, целесообразно оценивать качество управления при гармоническом воздействии. Все остальные возмущения можно разложить на ступенчатые воздействия с использованием интеграла Дюамеля, либо в ряд Фурье.
Все современные методы анализа качества управления можно разделить на прямые методыанализа по кривой переходного процесса или по частотным характеристикам, икосвенные методы, позволяющие, не решая дифференциального уравнения, определить некоторые показатели качества процесса управления; к ним, в частности, относятся корневые, интегральныеичастотные методы.
11.3.1. Оценка переходного процесса при ступенчатом воздействии.
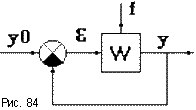
Пусть САР (рис.84)
при t = 0 воздействует возмущающий
факторfв виде единичной ступенчатой
функции. При нулевых начальных условиях
динамический режим описывается переходной
характеристикойh(t) =
![]() y(t)
= y(t) - y0
= -e(t)(рис.85). По ней можно определить
все наиболее важные показатели качества
управления.
y(t)
= y(t) - y0
= -e(t)(рис.85). По ней можно определить
все наиболее важные показатели качества
управления.
1.Статическая ошибкаeуст = y0 - yуст = -hуст- это разность между предписанным и действительным значением управляемой величины в установившемся режиме. Для статических систем статическая ошибка отлична от нуля (рис.85а) и пропорциональна величине возмущающего фактораf(в линейных САУ) и коэффициенту передачи системы по данному возмущению, а для астатических - равна нулю (рис.85б).
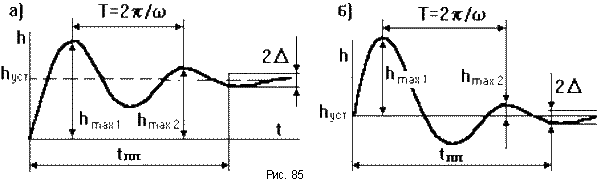
2.Время
переходного процессаtпп- это время от момента воздействия,
начиная с которого колебания управляемой
величины не превышают некоторого наперед
заданного значения, то есть |h(t)-hуст|
![]()
![]() .
Обычно принимают
.
Обычно принимают![]() =
0.05hуст.
=
0.05hуст.