ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.08.2024
Просмотров: 538
Скачиваний: 0
СОДЕРЖАНИЕ
Т. Н. Матыцина е. К. Коржевина линейная алгебра
1.1. Множества и их элементы. Способы задания множеств
1.2. Подмножества. Диаграммы Эйлера – Венна
1.3. Операции над множествами и их свойства
2. Пересечение (или произведение).
4. Декартовое произведение (или прямое произведение).
Свойства операций над множествами
1.4. Метод математической индукции
Операции над комплексными числами
Геометрическая интерпретация комплексных чисел
Тригонометрическая форма комплексного числа
Действия над комплексными числами в тригонометрической форме
4. Извлечение корня n-ой степени.
Показательная форма комплексного числа
Способы задания бинарных отношений
Операции над бинарными отношениями
2.2. Свойства бинарных отношений
2.3. Отношение эквивалентности
3. Матрицы и действия над ними
3.2. Основные операции над матрицами и их свойства
3.2.1. Сложение однотипных матриц
3.2.2. Умножение матрицы на число
4. Определители квадратных матриц
4.1. Определители матриц второго и третьего порядка
4.2. Определитель матрицы n-го порядка
4.4. Практическое вычисление определителей
5. Ранг матрицы. Обратная матрица
5.2. Нахождение ранга матрицы методом окаймления миноров
5.3. Нахождение ранга матрицы с помощью элементарных преобразований
5.4. Понятие обратной матрицы и способы ее нахождения
Алгоритм нахождения обратной матрицы
Нахождение обратной матрицы с помощью элементарных преобразований
6.1. Основные понятия и определения
6.2. Методы решения систем линейных уравнений
6.3. Исследование системы линейных уравнений
6.4. Однородные системы линейных уравнений
Свойства решений однородной системы линейных уравнений
Фундаментальный набор решений однородной системы линейных уравнений
7. Арифметическое n-мерное векторное пространство
7.2. Линейная зависимость и независимость системы векторов
Свойства линейной зависимости системы векторов
Две теоремы о линейной зависимости
7.3. Базис и ранг системы векторов
8. Векторные (линейные) пространства
8.1. Определение векторного пространства над произвольным полем.
Простейшие свойства векторных пространств
Линейная зависимость и независимость системы векторов
8.2. Подпространства. Линейные многообразия
Пересечение и сумма подпространств
8.3. Базис и размерность векторного пространства
8.3.1. Конечномерные векторные пространства
Базис конечномерного векторного пространства
8.3.2. Базисы и размерности подпространств
8.3.3. Координаты вектора относительно данного базиса
8.3.4. Координаты вектора в различных базисах
8.4 Евклидовы векторные пространства
Скалярное произведение в координатах
Скалярное произведение в ортонормированном базисе
Ортогональное дополнение подпространства
9.1. Основные понятия и способы задания линейных операторов
Способы задания линейных операторов
9.2. Матрица линейного оператора Связь между координатами вектора и координатами его образа
Матрицы линейного оператора в различных базисах
Свойства отношения подобия матриц
9.4. Действия над линейными операторами
1. Сложение линейных операторов.
Свойства сложения линейных операторов
9.5. Ядро и образ линейного оператора
9.6. Обратимые линейные операторы
9.7. Собственные векторы линейного оператора
9.7.1. Свойства собственных векторов
9.7.2. Характеристический многочлен матрицы
9.7.3. Нахождение собственных векторов линейного оператора
9.7.4. Алгоритм нахождения собственных векторов линейного оператора
9.7.5.Условия, при которых матрица подобна диагональной матрице
10. Жорданова нормальная форма матрицы линейного оператора
10.2. Жорданова нормальная форма
10.3.Приведение матрицы к жордановой (нормальной) форме
Алгоритм приведения матрицы a к жордановой форме
11. Билинейные и квадратичные формы
Преобразование матрицы билинейной формы при переходе к новому базису. Ранг билинейной формы
Приведение квадратичной формы к каноническому виду
Закон инерции квадратичных форм
Классификация квадратичных форм
Необходимое и достаточное условие знакоопределенности квадратичной формы
Необходимое и достаточное условие знакопеременности квадратичной формы
Необходимое и достаточное условие квазизнакопеременности квадратичной формы
10.2. Жорданова нормальная форма
Определение 10.5. Жордановой клеткой порядка k, относящейся к числу 0, называется матрица порядка k, 1 ≤ k ≤ n, имеющая вид
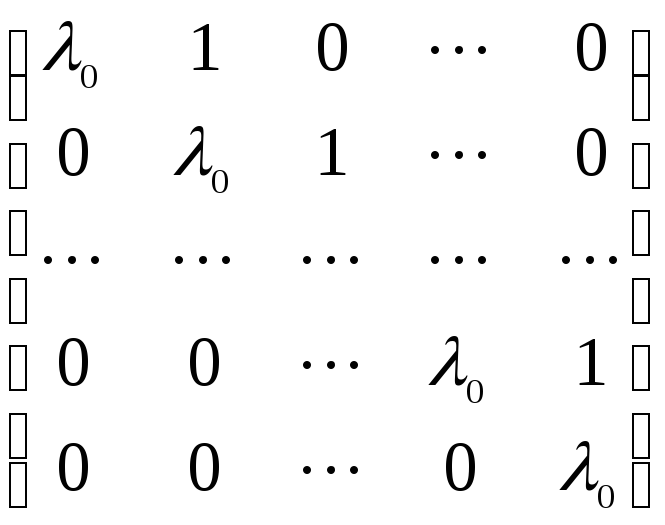 ,
,
на
ее главной диагонали стоит одно и то же
число 0,
а на параллельной ей сверху диагонали
стоят единицы, все же остальные элементы
равны нулю. Например: (0),
 ,
,
 – жордановы клетки первого, второго и
третьего порядков соответственно.
– жордановы клетки первого, второго и
третьего порядков соответственно.
Определение 10.6.
Жордановой
матрицей порядка n
называется матрица порядка n,
имеющая вид: J = 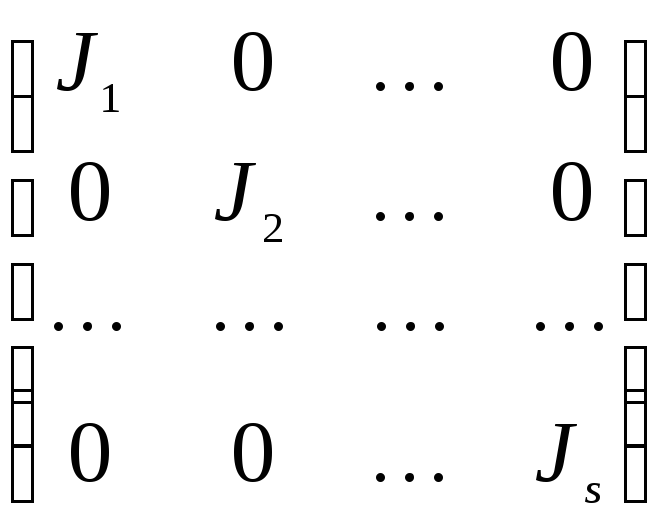 .
В ней вдоль главной диагонали идут
жордановы клетки J1,
J2,
…, Js
некоторых порядков, не обязательно
различных, и относящиеся к некоторым
числам, тоже не обязательно различным.
Все места вне этих клеток заняты нулями.
При этом s ≥ 1,
то есть одна жорданова клетка порядка
n
так же считается жордановой матрицей
и s ≤ n.
.
В ней вдоль главной диагонали идут
жордановы клетки J1,
J2,
…, Js
некоторых порядков, не обязательно
различных, и относящиеся к некоторым
числам, тоже не обязательно различным.
Все места вне этих клеток заняты нулями.
При этом s ≥ 1,
то есть одна жорданова клетка порядка
n
так же считается жордановой матрицей
и s ≤ n.
Замечание. Говорят, что матрица J имеет нормальную жорданову форму. Диагональная матрица является частным случаем жордановой матрицы, у нее все клетки имеют порядок 1.
10.3.Приведение матрицы к жордановой (нормальной) форме
Теорема 10.3. Жорданова нормальная форма определяется для матрицы однозначно с точностью до порядка расположения жордановых клеток на главной диагонали.
Приведем матрицу A(λ) = A – λE к каноническому виду с помощью элементарных преобразований.
A – λE = 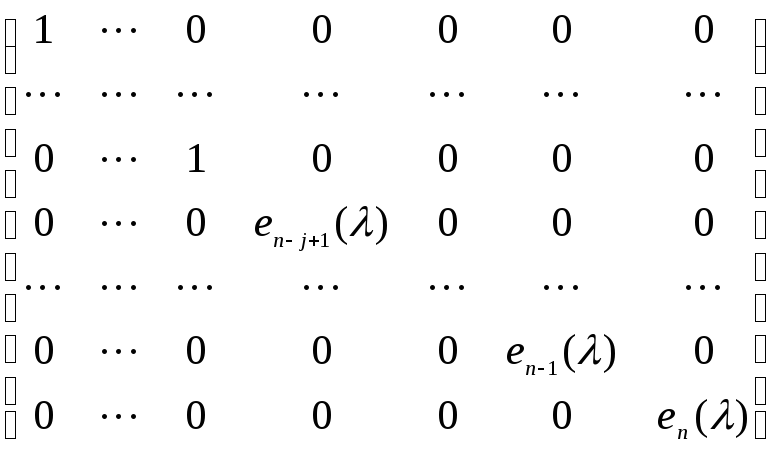 .
.
Отличные
от единицы многочлены en–j+1(λ),
…, en–1(λ),
en(λ)
называют инвариантными
множителями матрицы A(λ).
Среди них нет многочленов равных нулю,
сумма степеней всех этих многочленов
равна n,
и все они раскладываются на линейные
множители над множеством комплексных
чисел. Пусть en–j+1(λ)
раскладывается в произведение следующих
множителей:
![]() ,
,
![]() ,
…,
,
…,
![]() .
Назовем эти множители элементарными
делителями
многочлена en–j+1(λ).
.
Назовем эти множители элементарными
делителями
многочлена en–j+1(λ).
Определение 10.7. Элементарными делителями матрицы A(λ) называются элементарные делители всех многочленов en–j+1(λ), …, en–1(λ), en(λ).
Выпишем
жорданову матрицу J
порядка n,
составленную из жордановых клеток
определяемых следующим образом: каждому
элементарному делителю
![]() матрицы A(λ)
ставим в соответствие жорданову клетку
порядка kij,
относящуюся к числу i.
матрицы A(λ)
ставим в соответствие жорданову клетку
порядка kij,
относящуюся к числу i.
Пусть для некоторой матрицы порядка 9 характеристическая матрица A – λE приведена к каноническому виду.
A – λE = 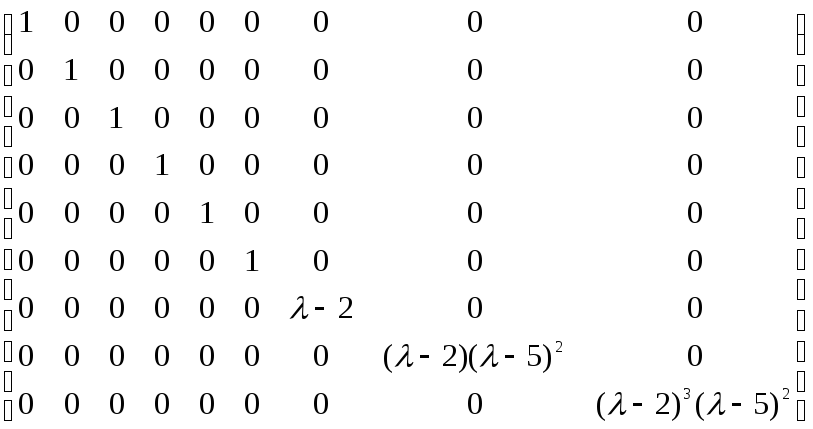 .
.
e1 = e2 = e3 = e4 = e5 = e6 = 1, e7 = – 2, e8 = ( – 2)( – 5)2, e9 = ( – 2)3( – 5)2 – инвариантные множители матрицы A – λE, ( – 2), ( – 2), ( – 5)2, ( – 2)3, ( – 5)2 – элементарные делители матрицы A – λE.
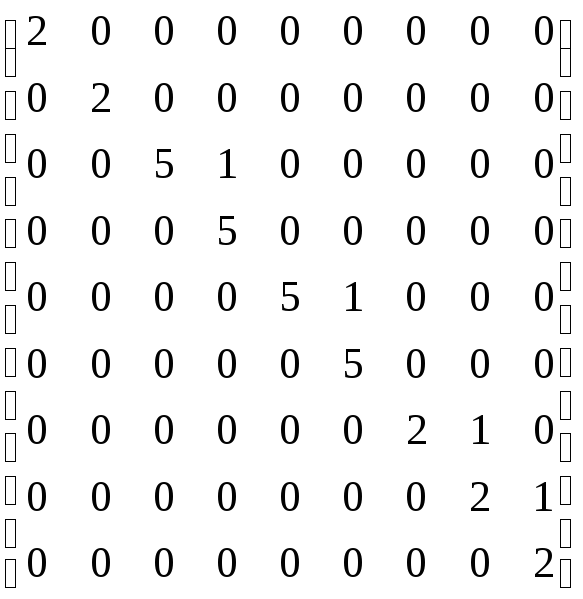
Получаем: две клетки порядка 1, относящиеся к числу 2, две клетки порядка 2, относящиеся к числу 5 , одну клетку порядка 3, относящуюся к числу 2, Выпишем жорданову форму матрицы A
Алгоритм приведения матрицы a к жордановой форме
Составить характеристическую матрицу A – λE.
Привести эту матрицу к канонической форме с помощью элементарных преобразований.
Разложить диагональные многочлены на линейные множители.
Найти элементарные делители и по ним выписать жорданову форму матрицы A.
Для того чтобы заданная матрица была подобна диагональной матрице, необходимо и достаточно, чтобы все элементарные делители ее характеристической матрицы были первой степени.
Пример 10.4.
Привести к жордановой форме матрицу
A = 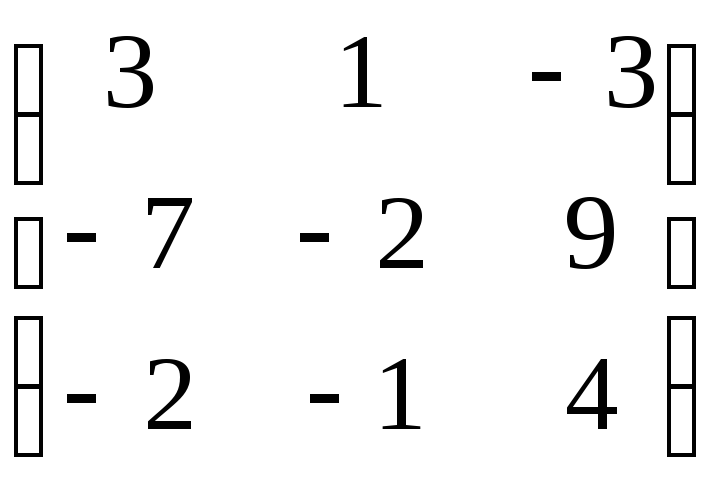 .
.
Решение.
с помощью элементарных преобразований
приводим матрицу A –λE
к следующему виду: A –λE = 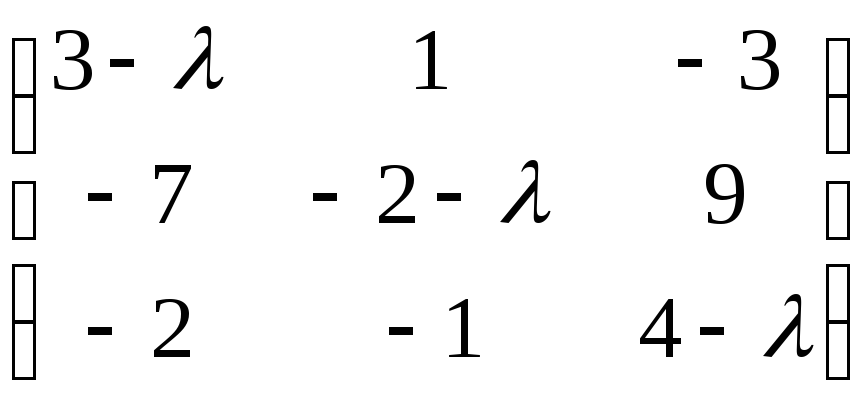
…
… 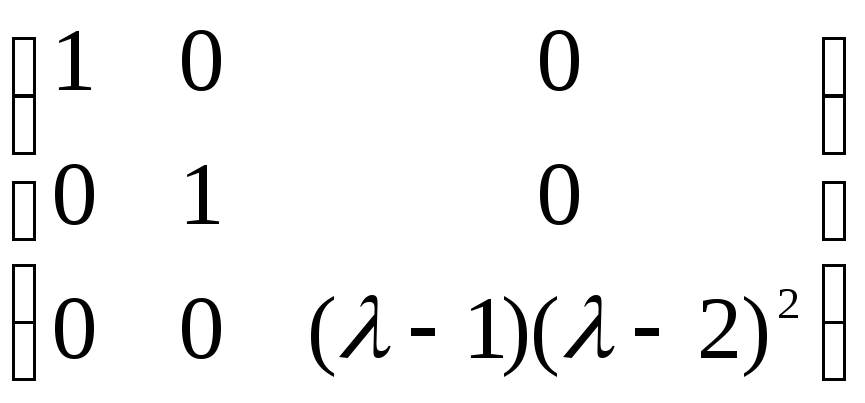 .
Инвариантные множители этой матрицы:
e1 = 1,
e2 = 1,
e3 = ( – 1)( – 2)2;
элементарные делители будут ( – 1),
( – 2)2.
.
Инвариантные множители этой матрицы:
e1 = 1,
e2 = 1,
e3 = ( – 1)( – 2)2;
элементарные делители будут ( – 1),
( – 2)2.
По
найденным элементарным делителям
выписываем жорданову форму исходной
матрицы
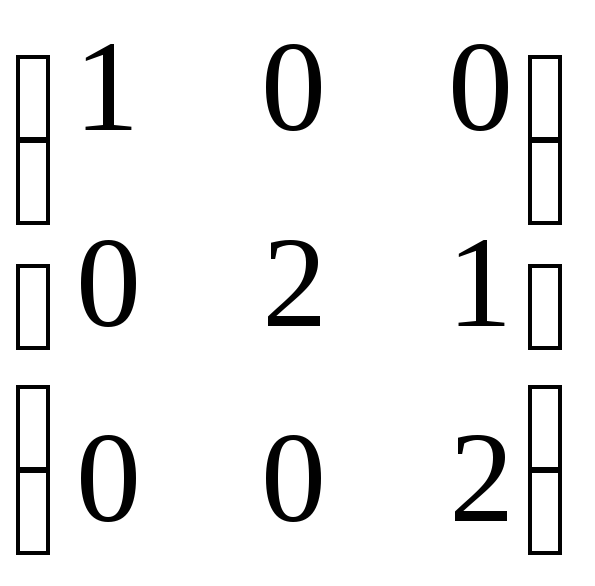 .
.
11. Билинейные и квадратичные формы
11.1. Билинейные формы
Определение 11.1. Билинейной формой называется функция (отображение) f: V V R (или C), где V – произвольное векторное пространство, и для любых векторов x, y V и любого числа λ R (или C) выполняются соотношения
f(x + y, z) = f(x, y) + f(z, y),
f(x, y + z) = f(x, y) + f(x, z),
f(λx, y) = λf(x, y),
f(x, λy) = λf(x, y).
Обозначим число, получаемое в результате отображения пары векторов x и y, как A(x, y) .
Определение 11.2. Билинейная форма A(x, y) называется симметрической, если для любых x, y V выполняется: A(x, y) = A(y, x).
Определение 11.3. Билинейная форма A(x, y) называется кососимметрической, если для любых x, y V выполняется: A(x, y) = –A(y, x).
Свойства билинейных форм
Любую билинейную форму можно представить в виде суммы симметричной кососимметричной форм.
При выбранном базисе e1, e2, …, en в векторном пространстве V любая билинейная форма A однозначно определяется матрицей
A(е) = 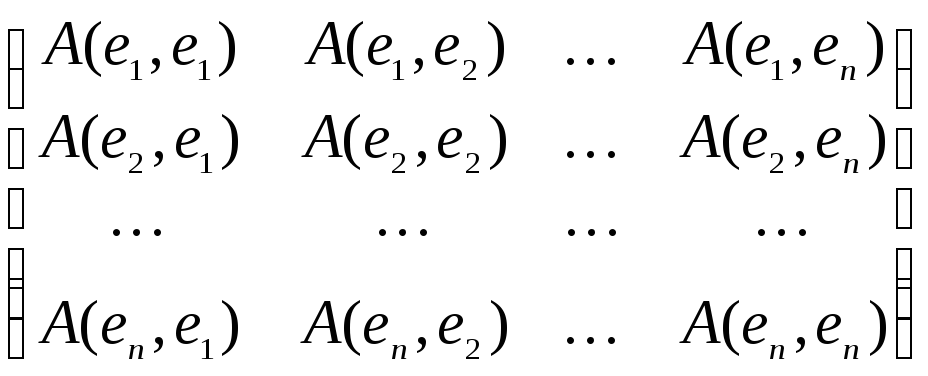 ,
,
так, что для любых x = x1e1 + x2e2 + … + xnen, y = y1e1 + y2e2 + … + ynen;
A(x,
y) = (x1 x2 … xn)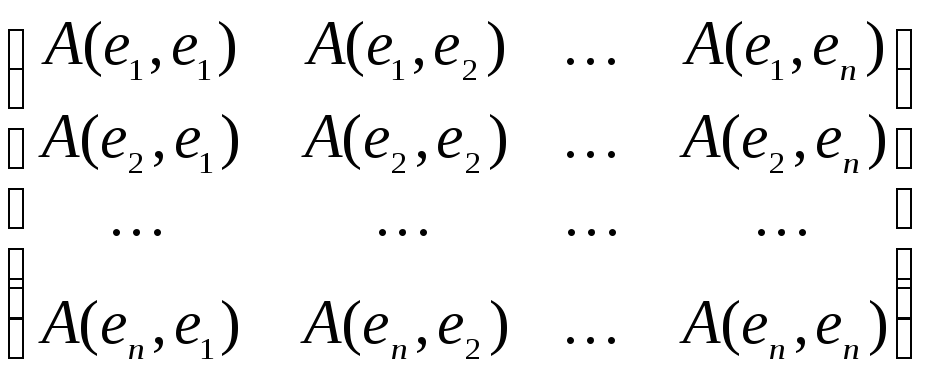
![]() ,
то
есть
,
то
есть
A(x,
y) = ![]() ,где
Аij = A(ei,
ej). (1)
,где
Аij = A(ei,
ej). (1)
Вид (1) назовем общим видом билинейной формы в n-мерном векторном пространстве.
Замечание. Если билинейная форма A(x, y) симметрическая, то и матрица (Aij) будет симметрической, то есть Aij = Aji для i, j = 1, 2, …, n. Если билинейная форма A(x, y) кососимметрическая, то и матрица (Aij) будет кососимметрической, то есть Aij = –Aji для i, j = 1, 2, …, n.
Преобразование матрицы билинейной формы при переходе к новому базису. Ранг билинейной формы
Пусть в векторном пространстве V заданы два базиса e = {e1, e2, …, en} и f = {f1, f2, …, fn}. Пусть A(e) = (аij) и A(f) = (bij) – матрицы билинейной формы A в указанных базисах.
Теорема 11.1. Матрицы A(e) и A(f) билинейной формы A(x, y) в базисах {e} и {f} связаны соотношением
A(f) = CtA(e)C, (),
где C – матрица перехода от базиса {e} к базису {f}, а Ct –транспонированная матрица C.
Следствие. Ранг матрицы A(f) равен рангу матрицы A(e).
Это утверждение следует из равенства (): так как С – матрица перехода от одного базиса к другому, то матрица С и матрица Ct– невырожденные, поэтому умножение на них матрицы A(e) не меняет ее ранга.
Определение 11.4. Рангом билинейной формы, заданной в конечномерном векторном пространстве V , называется ранг матрицы этой формы в произвольном базисе пространства V.
Определение 11.5. Билинейная форма называется невырожденной, если ее ранг равен размерности пространства V и вырожденной, если ее ранг меньше размерности пространства V.
11.2. Квадратичные формы
Пусть A(x, y) – симметрическая билинейная форма, заданная на векторном пространстве V.
Определение 11.6. Квадратичной формой называется числовая функция одного векторного аргумента x, которая получается из билинейной формы A(x, y) при x = y.
Определение 11.7. Симметрическая билинейная форма A(x, y) называется полярной квадратичной форме A(x, x).
Пусть
дана билинейная форма A(x,
y) = ![]() ,
положим
в ней xi = yj,
тогда мы получим представление
квадратичной формы A(x,
x)
в конечномерном векторном пространстве
V
с заданным базисом {e}:
,
положим
в ней xi = yj,
тогда мы получим представление
квадратичной формы A(x,
x)
в конечномерном векторном пространстве
V
с заданным базисом {e}:
A(x,
x) = ![]() . (2)
. (2)
Определение 11.8. Матрица (aij) называется матрицей квадратичной формы A(x, x) в заданном базисе {e}.