ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.08.2024
Просмотров: 532
Скачиваний: 0
СОДЕРЖАНИЕ
Т. Н. Матыцина е. К. Коржевина линейная алгебра
1.1. Множества и их элементы. Способы задания множеств
1.2. Подмножества. Диаграммы Эйлера – Венна
1.3. Операции над множествами и их свойства
2. Пересечение (или произведение).
4. Декартовое произведение (или прямое произведение).
Свойства операций над множествами
1.4. Метод математической индукции
Операции над комплексными числами
Геометрическая интерпретация комплексных чисел
Тригонометрическая форма комплексного числа
Действия над комплексными числами в тригонометрической форме
4. Извлечение корня n-ой степени.
Показательная форма комплексного числа
Способы задания бинарных отношений
Операции над бинарными отношениями
2.2. Свойства бинарных отношений
2.3. Отношение эквивалентности
3. Матрицы и действия над ними
3.2. Основные операции над матрицами и их свойства
3.2.1. Сложение однотипных матриц
3.2.2. Умножение матрицы на число
4. Определители квадратных матриц
4.1. Определители матриц второго и третьего порядка
4.2. Определитель матрицы n-го порядка
4.4. Практическое вычисление определителей
5. Ранг матрицы. Обратная матрица
5.2. Нахождение ранга матрицы методом окаймления миноров
5.3. Нахождение ранга матрицы с помощью элементарных преобразований
5.4. Понятие обратной матрицы и способы ее нахождения
Алгоритм нахождения обратной матрицы
Нахождение обратной матрицы с помощью элементарных преобразований
6.1. Основные понятия и определения
6.2. Методы решения систем линейных уравнений
6.3. Исследование системы линейных уравнений
6.4. Однородные системы линейных уравнений
Свойства решений однородной системы линейных уравнений
Фундаментальный набор решений однородной системы линейных уравнений
7. Арифметическое n-мерное векторное пространство
7.2. Линейная зависимость и независимость системы векторов
Свойства линейной зависимости системы векторов
Две теоремы о линейной зависимости
7.3. Базис и ранг системы векторов
8. Векторные (линейные) пространства
8.1. Определение векторного пространства над произвольным полем.
Простейшие свойства векторных пространств
Линейная зависимость и независимость системы векторов
8.2. Подпространства. Линейные многообразия
Пересечение и сумма подпространств
8.3. Базис и размерность векторного пространства
8.3.1. Конечномерные векторные пространства
Базис конечномерного векторного пространства
8.3.2. Базисы и размерности подпространств
8.3.3. Координаты вектора относительно данного базиса
8.3.4. Координаты вектора в различных базисах
8.4 Евклидовы векторные пространства
Скалярное произведение в координатах
Скалярное произведение в ортонормированном базисе
Ортогональное дополнение подпространства
9.1. Основные понятия и способы задания линейных операторов
Способы задания линейных операторов
9.2. Матрица линейного оператора Связь между координатами вектора и координатами его образа
Матрицы линейного оператора в различных базисах
Свойства отношения подобия матриц
9.4. Действия над линейными операторами
1. Сложение линейных операторов.
Свойства сложения линейных операторов
9.5. Ядро и образ линейного оператора
9.6. Обратимые линейные операторы
9.7. Собственные векторы линейного оператора
9.7.1. Свойства собственных векторов
9.7.2. Характеристический многочлен матрицы
9.7.3. Нахождение собственных векторов линейного оператора
9.7.4. Алгоритм нахождения собственных векторов линейного оператора
9.7.5.Условия, при которых матрица подобна диагональной матрице
10. Жорданова нормальная форма матрицы линейного оператора
10.2. Жорданова нормальная форма
10.3.Приведение матрицы к жордановой (нормальной) форме
Алгоритм приведения матрицы a к жордановой форме
11. Билинейные и квадратичные формы
Преобразование матрицы билинейной формы при переходе к новому базису. Ранг билинейной формы
Приведение квадратичной формы к каноническому виду
Закон инерции квадратичных форм
Классификация квадратичных форм
Необходимое и достаточное условие знакоопределенности квадратичной формы
Необходимое и достаточное условие знакопеременности квадратичной формы
Необходимое и достаточное условие квазизнакопеременности квадратичной формы
k = 2
2 = 2(cos![]() + isin
+ isin![]() ) = 2(cos + isin) = 2(–1 + i0) = –2,
) = 2(cos + isin) = 2(–1 + i0) = –2,
k = 3
3 = 2(cos![]() + isin
+ isin![]() ) = 2(cos
) = 2(cos![]() + isin
+ isin![]() ) = 2(0 –i)) = –2i.
) = 2(0 –i)) = –2i.
Замечание.
Геометрически все n
значений корней n-ой
степени из комплексного числа
r(cos + isin)
изображаются точками, лежащими на
окружности с центром в начале координат,
радиус которой равен
![]() .
Если эти точки соединить, то в результате
получится правильный n-угольник.
.
Если эти точки соединить, то в результате
получится правильный n-угольник.
Показательная форма комплексного числа
Из
математического анализа известно, что
e = ![]() ,
e
– иррациональное число. Эйлер в 1740 г.
опубликовал формулу, которая дает
возможность записать комплексное число
в показательной форме:
,
e
– иррациональное число. Эйлер в 1740 г.
опубликовал формулу, которая дает
возможность записать комплексное число
в показательной форме:
ei = cos + isin – формула Эйлера.
Тогда z = r(cos + isin) = rei – показательная форма записи комплексного числа, где r = |z|, = arg z.
К
комплексным числам в показательной
форме применимы все правила действия
над степенями. Пусть z1 = r1![]() ,
z2 = r2
,
z2 = r2![]() ,
тогда
,
тогда
z1z2 = r1r2![]() ,
,
![]() =
= ![]()
![]() ,
,
zn = rnein,
![]() =
= ![]()
![]() ,
где k = 0,
1, …, n – 1.
,
где k = 0,
1, …, n – 1.
Пример 1.17.
Представить комплексное число z = ![]() + i
в показательной форме.
+ i
в показательной форме.
Решение.
Имеем
z = ![]() +i
a =
+i
a = ![]() ,b = 1
r =
,b = 1
r = ![]() =
=![]() = 2;т. к.
a > 0,
то
=
= 2;т. к.
a > 0,
то
= ![]() =
= ![]() =
=![]() .Тогда
z =
.Тогда
z = ![]() + i = rei = 2
+ i = rei = 2![]() .
.
2. Бинарные отношения
2.1. Понятие отношения
Определение 2.1. n-арным (или n-местным) отношением P на множествах A1, A2, …, An называется любое подмножество прямого произведения A1 × A2 × … × An.
Обозначение n-местного отношения: P(x1, x2, …, xn).
В случае n = 1 отношение P называется унарным (одноместным) и является подмножеством множества A1.
При n = 2 P называется бинарным (двуместным) отношением или соответствием. Если P A1 A2, то также говорят, что Р есть отношение между множествами A1 и A2 (между элементами множеств A1 и A2) или что Р задано (определено) на паре множеств A1 и A2. Если A1 = A2 = A (P A A), то говорят, что Р есть бинарное отношение на множестве А.
Пусть Р – бинарное отношение и (x, y) P, тогда говорят, что элемент x находится в отношении P к элементу y, или что x и y связаны отношением P. Вместо записи (x, y) P часто пишут xPy.
Определение 2.2. Элементы x1, x2, …, xn.называются координатами, или компонентами, отношения P.
Определение 2.3.
Пусть P
A
B,
S
A
B.
Бинарные отношения P
и S
называются
равными
(пишут Р = S),
если для любых x A
и y B:
![]()
![]() .
.
Другими словами, отношения Р и S равны, если Р и S равны как множества.
Определение 2.4. Для любого множества А отношение idA = {(x, x) | x A} называется тождественным отношением (или диагональю), а UA = A2 = A A = {(x, y) | x, y A} – полным отношением (или универсальным отношением или полным квадратом).
Пусть Р – некоторое бинарное отношение, т. е. P A1 A2.
Определение 2.5. Областью определения бинарного отношения Р называется множество DomР = {x | y : (x, y) P}.
Определение 2.6. Областью значений бинарного отношения Р называется множество ImР = {y | x : (x, y) P}.
Пример 2.1. Задано множество Р = {(1, y), (2, y), (3, x)} на множествах А = {1, 2, 3} и B = {x, y}. Покажем, что это действительно отношение, т. е. P A В. Найдем декартовое произведение множеств А и В: A В = {(1, x), (1, y), (2, x), (2, y), (3, x), (3, y)}, следовательно, P A В.
Найдем область определения и область значений бинарного отношения Р.
DomР = {1, 2, 3} = А; ImР = {х, y} = В.
Пример 2.2. Пусть P R R : Р = {(х, y) | y = x2}. Найдем область определения и область значений бинарного отношения Р.
DomР = R; ImР = [0, +).
Способы задания бинарных отношений
Бинарные отношения можно задать одним из перечисленных способов.
1. Перечислением (см. пример 2.1). Такой способ задания применим только для конечных множеств.
2. Характеристическим свойством (см. пример 2.2).
3. Диаграммой. Пусть P A В – бинарное отношение. На диаграмме множества А и В изображаются с помощью кругов (или любых других связных фигур) на плоскости, а элементы множеств – точками внутри соответствующих кругов. Каждой упорядоченной паре (a, b) из бинарного отношения Р сопоставляется отрезок прямой (или любая другая линия без самопересечений), соединяющий точки a и b и имеющий направление, указываемое стрелкой, от первого элемента упорядоченной пары ко второму.
П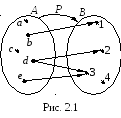 ример 2.3.
Пусть бинарное отношение Р
задано диаграммой на рис. 2.1. Определим
множества А,
В
и отношение Р
зададим перечислением.
ример 2.3.
Пусть бинарное отношение Р
задано диаграммой на рис. 2.1. Определим
множества А,
В
и отношение Р
зададим перечислением.
Решение. А = {a, b, c, d, e}, B = {1, 2, 3},
P = {(b, 1), (d, 2), (d, 3), (e, 3)}.
4. Графом. Если А = В, то диаграмма станет графом. Бинарному отношению Р ставим в соответствие следующую геометрическую фигуру на плоскости: точки, являются элементами множества DomР и ImР и ориентированные ребра (линии) – каждой паре (a, b) Р поставим в соответствие ориентированное ребро, идущее от а к b (если а ≠ b) и петлю (если а = b) с фиксированным направлением обхода. Такую фигуру будем называть ориентированным графом отношения Р.
К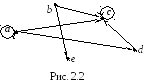 аждое
бинарное отношение на конечном множестве
можно представить ориентированным
графом. Обратно, каждый ориентированный
граф представляет бинарное отношение
на множестве его вершин.
аждое
бинарное отношение на конечном множестве
можно представить ориентированным
графом. Обратно, каждый ориентированный
граф представляет бинарное отношение
на множестве его вершин.
Пример 2.4. Граф, изображенный на рис. 2.2, задает отношение Р = {(a, a), (a, c), (a, d), (b, e), (b, c), (d, c), (c, c)} на множестве A = {a, b, c, d, e}.
5 . Графиком.
Этот способ применяется, если отношение
задано на числовых множествах.Графиком
бинарного отношения Р
называется множество точек плоскости
Oxy
с координатами (x,
y)
такие, что пара (x, y) Р.
. Графиком.
Этот способ применяется, если отношение
задано на числовых множествах.Графиком
бинарного отношения Р
называется множество точек плоскости
Oxy
с координатами (x,
y)
такие, что пара (x, y) Р.
Пример 2.5. График, изображенный на рис. 2.3, задает бинарное отношение Р = {(x, y) | y = x2, x, y R} на множестве R, т. е. Р R R.
6. Таблицей. Например, таблица дежурств, синусов, логарифмов и др.