ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.08.2024
Просмотров: 565
Скачиваний: 0
СОДЕРЖАНИЕ
Т. Н. Матыцина е. К. Коржевина линейная алгебра
1.1. Множества и их элементы. Способы задания множеств
1.2. Подмножества. Диаграммы Эйлера – Венна
1.3. Операции над множествами и их свойства
2. Пересечение (или произведение).
4. Декартовое произведение (или прямое произведение).
Свойства операций над множествами
1.4. Метод математической индукции
Операции над комплексными числами
Геометрическая интерпретация комплексных чисел
Тригонометрическая форма комплексного числа
Действия над комплексными числами в тригонометрической форме
4. Извлечение корня n-ой степени.
Показательная форма комплексного числа
Способы задания бинарных отношений
Операции над бинарными отношениями
2.2. Свойства бинарных отношений
2.3. Отношение эквивалентности
3. Матрицы и действия над ними
3.2. Основные операции над матрицами и их свойства
3.2.1. Сложение однотипных матриц
3.2.2. Умножение матрицы на число
4. Определители квадратных матриц
4.1. Определители матриц второго и третьего порядка
4.2. Определитель матрицы n-го порядка
4.4. Практическое вычисление определителей
5. Ранг матрицы. Обратная матрица
5.2. Нахождение ранга матрицы методом окаймления миноров
5.3. Нахождение ранга матрицы с помощью элементарных преобразований
5.4. Понятие обратной матрицы и способы ее нахождения
Алгоритм нахождения обратной матрицы
Нахождение обратной матрицы с помощью элементарных преобразований
6.1. Основные понятия и определения
6.2. Методы решения систем линейных уравнений
6.3. Исследование системы линейных уравнений
6.4. Однородные системы линейных уравнений
Свойства решений однородной системы линейных уравнений
Фундаментальный набор решений однородной системы линейных уравнений
7. Арифметическое n-мерное векторное пространство
7.2. Линейная зависимость и независимость системы векторов
Свойства линейной зависимости системы векторов
Две теоремы о линейной зависимости
7.3. Базис и ранг системы векторов
8. Векторные (линейные) пространства
8.1. Определение векторного пространства над произвольным полем.
Простейшие свойства векторных пространств
Линейная зависимость и независимость системы векторов
8.2. Подпространства. Линейные многообразия
Пересечение и сумма подпространств
8.3. Базис и размерность векторного пространства
8.3.1. Конечномерные векторные пространства
Базис конечномерного векторного пространства
8.3.2. Базисы и размерности подпространств
8.3.3. Координаты вектора относительно данного базиса
8.3.4. Координаты вектора в различных базисах
8.4 Евклидовы векторные пространства
Скалярное произведение в координатах
Скалярное произведение в ортонормированном базисе
Ортогональное дополнение подпространства
9.1. Основные понятия и способы задания линейных операторов
Способы задания линейных операторов
9.2. Матрица линейного оператора Связь между координатами вектора и координатами его образа
Матрицы линейного оператора в различных базисах
Свойства отношения подобия матриц
9.4. Действия над линейными операторами
1. Сложение линейных операторов.
Свойства сложения линейных операторов
9.5. Ядро и образ линейного оператора
9.6. Обратимые линейные операторы
9.7. Собственные векторы линейного оператора
9.7.1. Свойства собственных векторов
9.7.2. Характеристический многочлен матрицы
9.7.3. Нахождение собственных векторов линейного оператора
9.7.4. Алгоритм нахождения собственных векторов линейного оператора
9.7.5.Условия, при которых матрица подобна диагональной матрице
10. Жорданова нормальная форма матрицы линейного оператора
10.2. Жорданова нормальная форма
10.3.Приведение матрицы к жордановой (нормальной) форме
Алгоритм приведения матрицы a к жордановой форме
11. Билинейные и квадратичные формы
Преобразование матрицы билинейной формы при переходе к новому базису. Ранг билинейной формы
Приведение квадратичной формы к каноническому виду
Закон инерции квадратичных форм
Классификация квадратичных форм
Необходимое и достаточное условие знакоопределенности квадратичной формы
Необходимое и достаточное условие знакопеременности квадратичной формы
Необходимое и достаточное условие квазизнакопеременности квадратичной формы
1) A =  .
Для
этого случая собственные векторы уже
найдены (пример 9.7), линейно независимых
векторов
оказалось
только 2, а в базисе должно быть 3. Вывод:
матрица A
к
диагональному
виду
не приводится.
Другими
словами: матрица A
не подобна диагональной.
.
Для
этого случая собственные векторы уже
найдены (пример 9.7), линейно независимых
векторов
оказалось
только 2, а в базисе должно быть 3. Вывод:
матрица A
к
диагональному
виду
не приводится.
Другими
словами: матрица A
не подобна диагональной.
2) A =  .
Находим
собственные значения матрицы
A.
Вычислим определитель
.
Находим
собственные значения матрицы
A.
Вычислим определитель
|A – E| = 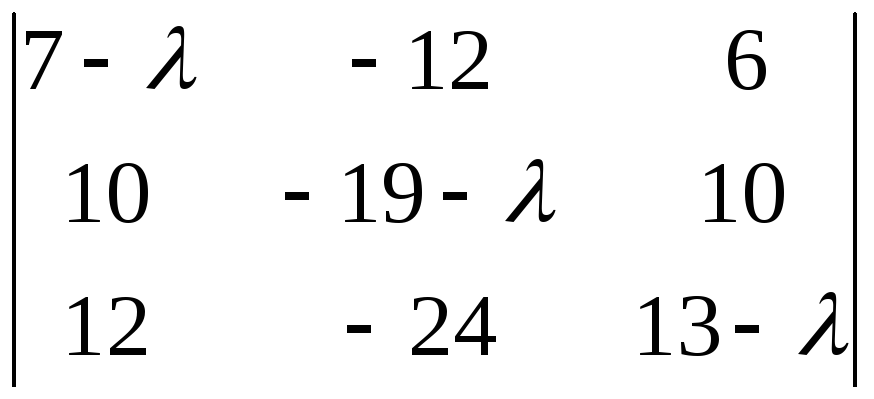 =
= 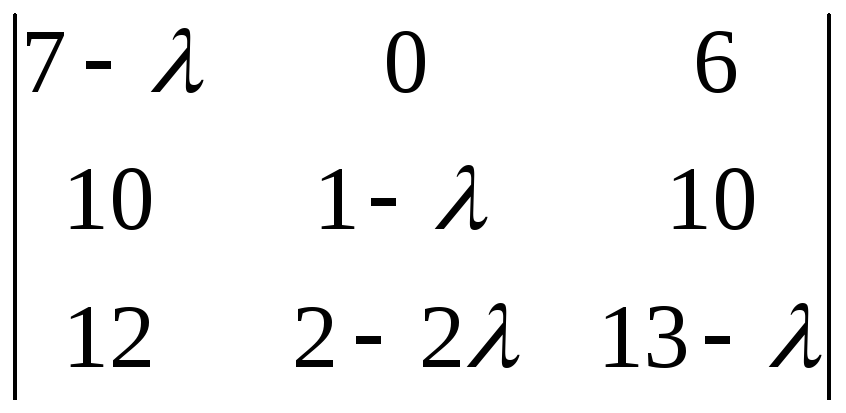 =
=
=(1 – ) = (1 – )
= (1 – ) =
=
= (1 – )1(–1)2 + 2![]() = (1 – )((7 – )(–7 – ) – 6(–8)) =
= (1 – )((7 – )(–7 – ) – 6(–8)) =
= (1 – )(2 – 1) = –( + 1)( – 1)2 = 0. Тогда 1 = 2 = 1, 3 = –1 – собственные значения матрицы A.
Находим
собственные векторы, соответствующие
этим собственным
значениям.
Рассмотрим случай 1 = 2 = 1.
Решаем однородную
систему
линейных
уравнений
(1 –2 1), тогда х1 = 2х2 – х3
–общее решение системы, векторы с1 = (2,
1, 0) с2 = (1,
0, –1) линейно независимые собственные
векторы с собственным
значением
1 = 2 = 1.
(1 –2 1), тогда х1 = 2х2 – х3
–общее решение системы, векторы с1 = (2,
1, 0) с2 = (1,
0, –1) линейно независимые собственные
векторы с собственным
значением
1 = 2 = 1.
Рассмотрим
случай 3 = –1.
Получаем систему
 .
Решая ее, получим только один линейно
независимый
собственный
вектор
с3 = (3,
5, 6).
.
Решая ее, получим только один линейно
независимый
собственный
вектор
с3 = (3,
5, 6).
Найдены три линейно независимых собственных вектора с1, с2, с3. Выберем их в качестве нового базиса и найдем матрицу линейного оператора в этом базисе.
Поскольку
(с1) = 1с1,
(с2) = 1с2,
(с3) = (–1)с3,
то матрица линейного оператора
M '() =  и T =
и T =  –матрица
перехода от старого базиса к новому.
–матрица
перехода от старого базиса к новому.
10. Жорданова нормальная форма матрицы линейного оператора
10.1. Понятие λ-матрицы
Известно, что матрица линейного оператора в базисе из собственных векторов приводится к диагональному виду. Однако над множеством действительных чисел линейный оператор может не иметь собственных значений, а значит и собственных векторов. Над множеством комплексных чисел любой линейный оператор имеет собственные векторы, но их может быть недостаточно для базиса. Есть другая каноническая форма матрицы линейного оператора, к которой можно привести любую матрицу над множеством комплексных чисел.
Теорема 10.1. Всякая матрица с комплексными элементами приводится во множестве комплексных чисел C к жордановой14 нормальной форме.
Дадим необходимые определения:
Определение 10.1. Квадратная матрица порядка n, элементами которой служат многочлены произвольной степени от переменной λ с коэффициентами из множества комплексных чисел C, называется λ-матрицей (или многочленной матрицей, или полиномиальной матрицей).
Примером многочленной матрицы служит характеристическая матрица A – λE произвольной квадратной матрицы A. На главной диагонали стоят многочлены первой степени, вне ее – многочлены нулевой степени или нули. Обозначим такую матрицу как A(λ).
Пример 10.1.
Пусть дана матрица A =  ,
тогда A – λE =
=
,
тогда A – λE =
=  = A(λ).
= A(λ).
Определение 10.2. Элементарными преобразованиями λ-матрицы называют следующие преобразования:
умножение любой строки (столбца) матрицы A(λ) на любое число, не равное нулю;
прибавление к любой i-той строке (i-ому столбцу) матрицы A(λ) любой другой j-ой строки (j-ого столбца), умноженной на произвольный многочлен ().
Свойства λ-матрицы
1) С помощью этих преобразований в матрице A(λ) можно переставить любые две строки или любые два столбца.
2) С помощью этих преобразований в диагональной матрице A(λ) можно менять местами диагональные элементы.
Пример 10.2.
1) ![]()
![]()
![]()
![]()
![]() .
.
2) ![]()
![]()
![]() .
.
Определение 10.3. Матрицы A(λ) и B(λ) называются эквивалентными, если от A(λ) можно перейти к B(λ) при помощи конечного числа элементарных преобразований.
Задача заключается в том, чтобы по возможности упростить матрицу A(λ).
Определение 10.4. Канонической λ-матрицей называется λ-матрица, обладающая следующими свойствами:
матрица A(λ) диагональная;
всякий многочлен еi(), i = 1, 2, …, n нацело делится на еi–1();
старший коэффициент каждого многочлена еi(), i = 1, 2, …, n равен 1, или этот многочлен равен нулю.
A(λ) =  .
.
Замечание. Если среди многочленов еi() встречаются нули, то они занимают на главной диагонали последние места (по свойству 2), если есть многочлены нулевой степени, то они равны 1 и занимают на главной диагонали первые места.
Нулевая и единичная матрицы являются каноническими λ-матрицами.
Теорема 10.2. Всякая λ-матрица эквивалентна некоторой канонической λ-матрице (то есть она приводится элементарными преобразованиями к каноническому виду)
Пример 10.3.
Привести матрицу A(λ) =  к каноническому виду.
к каноническому виду.
Решение. Ход преобразований аналогичен преобразованиям в методе Гаусса, при этом левый верхний элемент матрицы при приведении ее к каноническому виду отличен от нуля и имеет наименьшую степень.
A(λ) =  (меняем
местами первый и второй столбцы)
(меняем
местами первый и второй столбцы)  (к
второму столбцу прибавляем первый
столбец, умноженный на ( – 2))
(к
второму столбцу прибавляем первый
столбец, умноженный на ( – 2)) 
(ко второй строке прибавляем первую
строку, умноженную на ( – 2))
(ко второй строке прибавляем первую
строку, умноженную на ( – 2))
 (меняем
местами второй и третий столбцы)
(меняем
местами второй и третий столбцы)
 (к
третьему столбцу прибавляем второй
столбец умноженный на ( – 2)3)
(к
третьему столбцу прибавляем второй
столбец умноженный на ( – 2)3)
(к третьей строке прибавляем вторую
строку, умноженную на ( – 2))
(к третьей строке прибавляем вторую
строку, умноженную на ( – 2))
 .
.