ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.08.2024
Просмотров: 507
Скачиваний: 0
СОДЕРЖАНИЕ
Т. Н. Матыцина е. К. Коржевина линейная алгебра
1.1. Множества и их элементы. Способы задания множеств
1.2. Подмножества. Диаграммы Эйлера – Венна
1.3. Операции над множествами и их свойства
2. Пересечение (или произведение).
4. Декартовое произведение (или прямое произведение).
Свойства операций над множествами
1.4. Метод математической индукции
Операции над комплексными числами
Геометрическая интерпретация комплексных чисел
Тригонометрическая форма комплексного числа
Действия над комплексными числами в тригонометрической форме
4. Извлечение корня n-ой степени.
Показательная форма комплексного числа
Способы задания бинарных отношений
Операции над бинарными отношениями
2.2. Свойства бинарных отношений
2.3. Отношение эквивалентности
3. Матрицы и действия над ними
3.2. Основные операции над матрицами и их свойства
3.2.1. Сложение однотипных матриц
3.2.2. Умножение матрицы на число
4. Определители квадратных матриц
4.1. Определители матриц второго и третьего порядка
4.2. Определитель матрицы n-го порядка
4.4. Практическое вычисление определителей
5. Ранг матрицы. Обратная матрица
5.2. Нахождение ранга матрицы методом окаймления миноров
5.3. Нахождение ранга матрицы с помощью элементарных преобразований
5.4. Понятие обратной матрицы и способы ее нахождения
Алгоритм нахождения обратной матрицы
Нахождение обратной матрицы с помощью элементарных преобразований
6.1. Основные понятия и определения
6.2. Методы решения систем линейных уравнений
6.3. Исследование системы линейных уравнений
6.4. Однородные системы линейных уравнений
Свойства решений однородной системы линейных уравнений
Фундаментальный набор решений однородной системы линейных уравнений
7. Арифметическое n-мерное векторное пространство
7.2. Линейная зависимость и независимость системы векторов
Свойства линейной зависимости системы векторов
Две теоремы о линейной зависимости
7.3. Базис и ранг системы векторов
8. Векторные (линейные) пространства
8.1. Определение векторного пространства над произвольным полем.
Простейшие свойства векторных пространств
Линейная зависимость и независимость системы векторов
8.2. Подпространства. Линейные многообразия
Пересечение и сумма подпространств
8.3. Базис и размерность векторного пространства
8.3.1. Конечномерные векторные пространства
Базис конечномерного векторного пространства
8.3.2. Базисы и размерности подпространств
8.3.3. Координаты вектора относительно данного базиса
8.3.4. Координаты вектора в различных базисах
8.4 Евклидовы векторные пространства
Скалярное произведение в координатах
Скалярное произведение в ортонормированном базисе
Ортогональное дополнение подпространства
9.1. Основные понятия и способы задания линейных операторов
Способы задания линейных операторов
9.2. Матрица линейного оператора Связь между координатами вектора и координатами его образа
Матрицы линейного оператора в различных базисах
Свойства отношения подобия матриц
9.4. Действия над линейными операторами
1. Сложение линейных операторов.
Свойства сложения линейных операторов
9.5. Ядро и образ линейного оператора
9.6. Обратимые линейные операторы
9.7. Собственные векторы линейного оператора
9.7.1. Свойства собственных векторов
9.7.2. Характеристический многочлен матрицы
9.7.3. Нахождение собственных векторов линейного оператора
9.7.4. Алгоритм нахождения собственных векторов линейного оператора
9.7.5.Условия, при которых матрица подобна диагональной матрице
10. Жорданова нормальная форма матрицы линейного оператора
10.2. Жорданова нормальная форма
10.3.Приведение матрицы к жордановой (нормальной) форме
Алгоритм приведения матрицы a к жордановой форме
11. Билинейные и квадратичные формы
Преобразование матрицы билинейной формы при переходе к новому базису. Ранг билинейной формы
Приведение квадратичной формы к каноническому виду
Закон инерции квадратичных форм
Классификация квадратичных форм
Необходимое и достаточное условие знакоопределенности квадратичной формы
Необходимое и достаточное условие знакопеременности квадратичной формы
Необходимое и достаточное условие квазизнакопеременности квадратичной формы
Определение 7.14. Базисом системы S называется такая ее подсистема S', что
система S' линейно независима;
каждый вектор системы S линейно выражается через векторы системы S'.
Определение 7.15. Базисом системы S называется максимальная линейно независимая ее подсистема S', то есть
система S' линейно независима;
если к S' добавить любой вектор из системы S, то получится линейно зависимая система.
Рассмотрим линейно независимую систему векторов; она совпадает со своей максимальной линейно независимой подсистемой. Это означает, что базис такой системы совпадает с ней самой. Базис ступенчатой системы векторов тоже совпадает с ней самой, в силу ее линейной независимости.
Теорема 7.3. Два различных базиса одной и той же системы векторов содержат одинаковое количество векторов.
Доказательство. Пусть S –данная система векторов. Векторы а1, а2, …, аm – базис S' системы S, векторы b1, b2, …, bk – базис S'' системы S. Так как а1, а2, …, аm – базис, то b1, b2, …, bk L(а1, а2, …, аm) и b1, b2, …, bk линейно независимы, тогда по следствию из двух терем 7.1 и 7.2 k m.
Так как b1, b2, …, bk – базис, то а1, а2, …, аm L(b1, b2, …, bk) и а1, а2, …, аm – линейно независимы, тогда по тому же следствию m k, и окончательно получаем, что m = k. Теорема доказана.
Базис пространства Rn
Векторы e1, e2, …, en образуют базис пространства Rn, так как e1, e2, …, en – линейно независимы, и каждый вектор из Rn линейно выражается через эти векторы. По предыдущей теореме 7.3 в другом базисе Rn должно быть столько же векторов, сколько и в этом, то есть n. Сформулируем этот вывод в виде теоремы.
Теорема 7.4. Базисы пространства Rn – это в точности все линейно независимые системы, состоящие из n векторов.
Другими словами, система, состоящая из n линейно независимых векторов – это базис, и наоборот, базис Rn – это система, состоящая из n линейно независимых векторов.
Ранг системы векторов
Дадим два равносильных определения ранга системы векторов.
Определение 7.16. Рангом системы векторов называется количество векторов в любом базисе этой системы.
Определение 7.17. Рангом системы векторов называется максимальное число линейно независимых векторов в этой системе.
Если дана система векторов а1, а2, …, аm пространства Rn, то ранг r этой системы не больше количества векторов в ней и не больше размерности пространства Rn, то есть r m и r n, или r min(m, n).
Ранг линейно независимой системы векторов равен количеству векторов в ней.
Ранг ступенчатой системы векторов равен количеству векторов в ней.
Лемма 7.1 (о ранге системы векторов). Ранг системы векторов не изменится, если к ней добавить (или удалить) вектор, являющийся линейной комбинацией остальных.
На основании этой леммы можно доказать теорему.
Теорема 7.5. Ранг системы векторов не меняется при следующих преобразованиях, называемых элементарными:
умножение вектора на число, не равное нулю;
прибавление к одному вектору другого, умноженного на произвольное число;
удаление нулевого вектора.
С помощью этих преобразований векторы системы можно поменять местами.
Практическое нахождение ранга и базиса системы векторов
Из данной системы векторов составляем матрицу, расположив векторы как строки этой матрицы. Приводим матрицу к ступенчатому виду с помощью элементарных преобразований над строками этой матрицы. При этом не меняется ни ранг матрицы, ни ранг системы векторов-строк. Ранг полученной ступенчатой матрицы, а также полученной ступенчатой системы векторов равен количеству оставшихся ненулевых строк. Базисом системы векторов являются те векторы, на месте которых остались ненулевые строки.
Пример 7.4. Найти ранг и базис системы векторов а1 = (1, 3, 0, 5), а2 = (1, 2, 0, 4), а3 = (1, 1, 1, 3) а4 = (1, 0, –1, 0), а5 = (1, –3, 3, –1).
Решение. Действуем по описанной схеме.
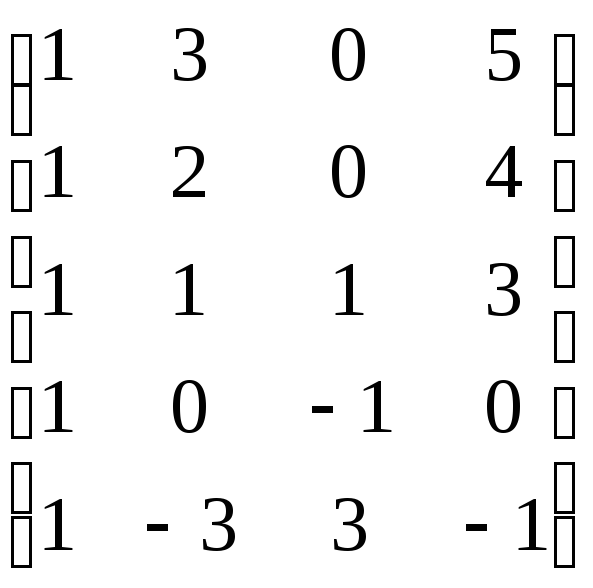
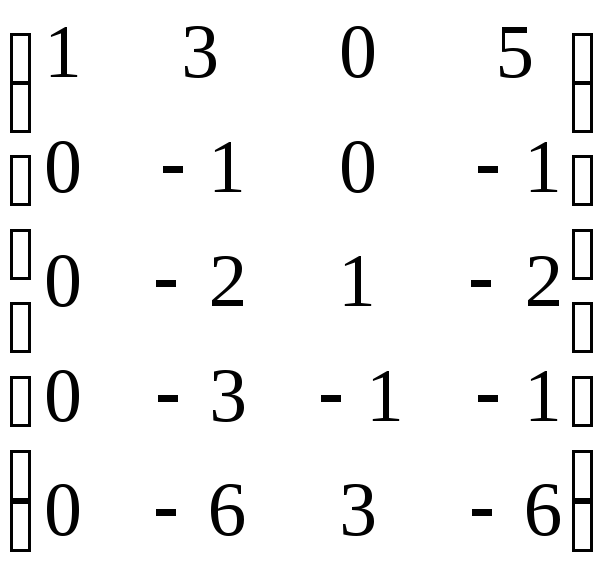
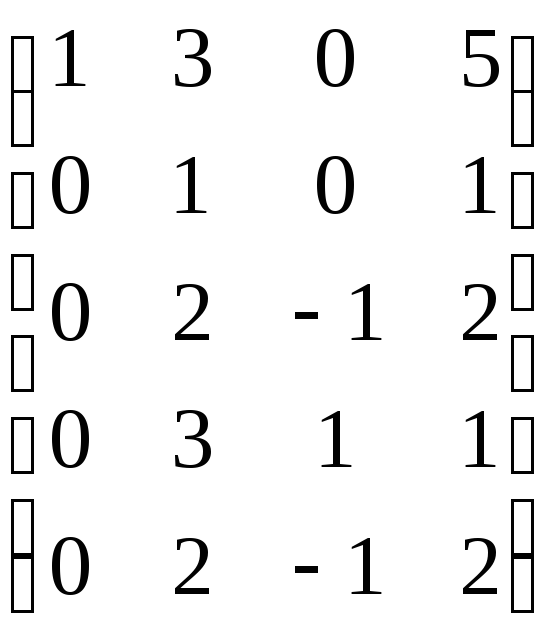
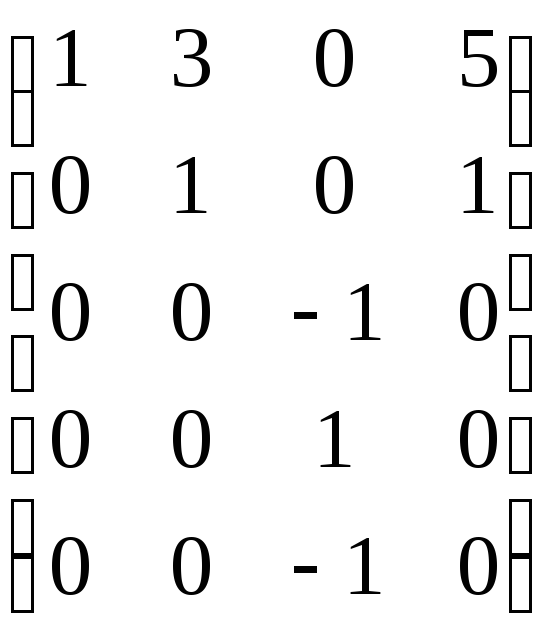
 .
.
Ранг системы векторов равен трем (по количеству оставшихся ненулевых строк), один из базисов образуют векторы а1, а2, а3.
Нахождение ранга системы векторов позволяет решать вопрос о линейной зависимости системы векторов. Если ранг системы векторов равен количеству векторов в системе, то эта система линейно независима, если же ранг системы векторов меньше количества векторов в системе, то эта система векторов линейно зависима.
Так как ранг рассмотренной системы (пример 7.4) векторов а1, а2, а3, а4, а5 равен трем и меньше числа векторов, то есть пяти, то система векторов а1, а2, а3, а4, а5 линейно зависима.
8. Векторные (линейные) пространства
8.1. Определение векторного пространства над произвольным полем.
Пусть P – произвольное поле. Известные нам примеры полей – поле рациональных, действительных, комплексных чисел.
Определение 8.1. Множество V называется векторным (или линейным) пространством над полем P, если для каждых двух элементов a, b V определена сумма a + b V,и для каждого k P и для каждого a V определено произведение ka V, причем справедливы следующие равенства: для любых a, b, c V и любых k, l P
a + b = b + a;
a + (b + c) = (a + b) + c;
о V : a + о = a;
а, (–а) : a + (–a) = о;
1a = a, 1 P;
k(la) = l(ka) = (lk)a;
(k + l)a = ka + la;
k(a + b) = ka + kb.
Элементы векторного пространства принято называть векторами, о - нулевой вектор; (–а) – вектор, противоположный вектору а; 1 P – единица поля P.
Примеры 8.1. Приведем примеры векторных пространств.
1) Rn – арифметическое n-мерное векторное пространство.
2) Множество матриц одного итого же размера с действительными коэффициентами Rmn, сложение матриц и умножение их на действительное число определены.
3) R[x] – множество многочленов с действительными коэффициентами, сложение многочленов и умножение их на действительное число известны.
4) R[x](n) – множество многочленов с действительными коэффициентами степени, не превосходящей n.
5) Множество направленных отрезков плоскости или пространства с общим началом в начале координат. Сложение таких отрезков осуществляется по правилу параллелограмма, умножение по известному правилу.
6) R(a, b) – множество функций определенных, дифференцируемых на отрезке [a, b].
Если числа в определении 8.1 k, l … брать из поля действительных (вещественных) чисел R, т. е. Р = R, то пространство называется вещественным векторным (линейным) пространством; если же из поля комплексных чисел, то приходим к понятию комплексного линейного пространства.
Простейшие свойства векторных пространств
1) о – нулевой вектор (элемент), определен единственным образом в произвольном векторном пространстве над полем.
2) Для любого вектора a V существует единственный противоположный элемент (–a) V.
3) a, b V уравнение а + х = b разрешимо единственным образом x = b + (–a) и обозначается как x = b – a, и называется разностью.
4) операция сложения сократима: если а + b = a + c, то b = c для любых a, b, c V.
5) если а + b = a, то b = o.
6) если а + b = о, то а = –b и b = –a.
7) –(–а) = а.
8) 0а = о, где 0 элемент поля P, а о – нулевой вектор пространства V.
9) kо = о, здесь k P, о V.
10) если kа = о, то k = 0 или а =о.
11) (–1)а = –а.
12) (k – l)a = ka – la, где k, l P, а V.
13) k(a – b) = ka – kb, где k P, а, b V.
14) (–k)а = –kа.
Линейная зависимость и независимость системы векторов
Для произвольного векторного пространства понятия линейной комбинации, линейной оболочки системы векторов, линейной зависимости и независимости системы векторов определяется точно так, как и для n-мерного арифметического векторного пространства. Выполняются все свойства линейной зависимости (кроме свойства, связанного со ступенчатой системой векторов).