ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.08.2024
Просмотров: 520
Скачиваний: 0
СОДЕРЖАНИЕ
Т. Н. Матыцина е. К. Коржевина линейная алгебра
1.1. Множества и их элементы. Способы задания множеств
1.2. Подмножества. Диаграммы Эйлера – Венна
1.3. Операции над множествами и их свойства
2. Пересечение (или произведение).
4. Декартовое произведение (или прямое произведение).
Свойства операций над множествами
1.4. Метод математической индукции
Операции над комплексными числами
Геометрическая интерпретация комплексных чисел
Тригонометрическая форма комплексного числа
Действия над комплексными числами в тригонометрической форме
4. Извлечение корня n-ой степени.
Показательная форма комплексного числа
Способы задания бинарных отношений
Операции над бинарными отношениями
2.2. Свойства бинарных отношений
2.3. Отношение эквивалентности
3. Матрицы и действия над ними
3.2. Основные операции над матрицами и их свойства
3.2.1. Сложение однотипных матриц
3.2.2. Умножение матрицы на число
4. Определители квадратных матриц
4.1. Определители матриц второго и третьего порядка
4.2. Определитель матрицы n-го порядка
4.4. Практическое вычисление определителей
5. Ранг матрицы. Обратная матрица
5.2. Нахождение ранга матрицы методом окаймления миноров
5.3. Нахождение ранга матрицы с помощью элементарных преобразований
5.4. Понятие обратной матрицы и способы ее нахождения
Алгоритм нахождения обратной матрицы
Нахождение обратной матрицы с помощью элементарных преобразований
6.1. Основные понятия и определения
6.2. Методы решения систем линейных уравнений
6.3. Исследование системы линейных уравнений
6.4. Однородные системы линейных уравнений
Свойства решений однородной системы линейных уравнений
Фундаментальный набор решений однородной системы линейных уравнений
7. Арифметическое n-мерное векторное пространство
7.2. Линейная зависимость и независимость системы векторов
Свойства линейной зависимости системы векторов
Две теоремы о линейной зависимости
7.3. Базис и ранг системы векторов
8. Векторные (линейные) пространства
8.1. Определение векторного пространства над произвольным полем.
Простейшие свойства векторных пространств
Линейная зависимость и независимость системы векторов
8.2. Подпространства. Линейные многообразия
Пересечение и сумма подпространств
8.3. Базис и размерность векторного пространства
8.3.1. Конечномерные векторные пространства
Базис конечномерного векторного пространства
8.3.2. Базисы и размерности подпространств
8.3.3. Координаты вектора относительно данного базиса
8.3.4. Координаты вектора в различных базисах
8.4 Евклидовы векторные пространства
Скалярное произведение в координатах
Скалярное произведение в ортонормированном базисе
Ортогональное дополнение подпространства
9.1. Основные понятия и способы задания линейных операторов
Способы задания линейных операторов
9.2. Матрица линейного оператора Связь между координатами вектора и координатами его образа
Матрицы линейного оператора в различных базисах
Свойства отношения подобия матриц
9.4. Действия над линейными операторами
1. Сложение линейных операторов.
Свойства сложения линейных операторов
9.5. Ядро и образ линейного оператора
9.6. Обратимые линейные операторы
9.7. Собственные векторы линейного оператора
9.7.1. Свойства собственных векторов
9.7.2. Характеристический многочлен матрицы
9.7.3. Нахождение собственных векторов линейного оператора
9.7.4. Алгоритм нахождения собственных векторов линейного оператора
9.7.5.Условия, при которых матрица подобна диагональной матрице
10. Жорданова нормальная форма матрицы линейного оператора
10.2. Жорданова нормальная форма
10.3.Приведение матрицы к жордановой (нормальной) форме
Алгоритм приведения матрицы a к жордановой форме
11. Билинейные и квадратичные формы
Преобразование матрицы билинейной формы при переходе к новому базису. Ранг билинейной формы
Приведение квадратичной формы к каноническому виду
Закон инерции квадратичных форм
Классификация квадратичных форм
Необходимое и достаточное условие знакоопределенности квадратичной формы
Необходимое и достаточное условие знакопеременности квадратичной формы
Необходимое и достаточное условие квазизнакопеременности квадратичной формы
3. Множество собственных векторов с одним и тем собственным значением λ при добавлении нулевого вектора образует подпространство пространства V.
Доказательство. Обозначим это множество символом L(). Докажем, что множество L() {o} образует подпространство пространства V, для чего проверим его замкнутость относительно сложения векторов и умножения их на элемент поля.
Пусть x, y L() {o}, тогда (x) = х, (y) = y. Найдем (x + y): (x + y) = (x) + (y) = х + y = (х + y), значит (х + y) L() {o}.
Пусть x L() {o}, k P, (x) = х, тогда (kx) = k(x) = k(х) = (kх), значит kх L() {o}.
4. Собственные векторы с попарно различными собственными значениями линейно независимы.
Следствие. Линейный оператор, заданный в n-мерном линейном пространстве, не может иметь более чем n различных собственных значений.
9.7.2. Характеристический многочлен матрицы
Дана матрица A Рnn (или A Rnn).
Определение 9.14. Характеристическим многочленом матрицы A называется многочлен, зависящий от λ и равный |A – E|, т. е. многочлен f(λ) = |A – E|, где E – единичная матрица таково же порядка что и А.
Пример 9.6.
Найти
характеристический
многочлен матрицы
A =  .
.
Решение. Составим определитель матрицы A – E и вычислим его
|A – E| =  =
=  =
=
= (2 – λ)(–1)2 + 2
![]() ·
·![]() = (2 – λ)((1 – )(–1 – ) – 8) =
= (2 – λ)((1 – )(–1 – ) – 8) =
= (2 – λ)(λ – 3)(λ + 3).
Определение 9.15. Характеристическим уравнением матрицы A называется уравнение |A – E| = 0.
Определение 9.16. Собственными значениями (собственными числами) матрицы A называются корни ее характеристического уравнения.
Найдем собственные значения матрицы из примера 9.6: (2 – λ)(λ – 3)(λ + 3) = 0. Получим: 1 = 2, 2 = 3, 3 = –3.
Теорема 9.12. Характеристические многочлены подобных матриц равны.
Доказательство. Пусть матрицы А и В подобны, то есть А = T –1ВТ. Тогда
|A – E| = |T –1ВТ – T –1ЕТ | = |T –1(В – Е)Т | = |T –1||В – Е||Т | = = |T –1||Т ||В – Е| = |T –1Т ||В – Е| = |E||В – Е| = 1|В – Е| = |В – Е|.
Так как характеристические многочлены равны, то совпадают и множества собственных значений подобных матриц А и В.
Следствие. Характеристический многочлен матрицы линейного оператора не зависит от базиса, в котором найдена эта матрица (матрицы линейного оператора, найденные в различных базисах, подобны).
9.7.3. Нахождение собственных векторов линейного оператора
Для
нахождения собственных векторов
линейного оператора ![]() надо
найти
решения
уравнения
(х) = λx,
в котором неизвестными величинами
являются собственные значения
λ
линейного оператора
и ненулевые
векторы
x.
надо
найти
решения
уравнения
(х) = λx,
в котором неизвестными величинами
являются собственные значения
λ
линейного оператора
и ненулевые
векторы
x.
Для нахождения собственных значений линейного оператора используется следующая теорема.
Теорема 9.13. Множество собственных значений линейного оператора совпадает с множеством собственных значений его матрицы.
Доказательство. Пусть λ – собственное значение линейного оператора . Это означает, что существует ненулевой вектор x, такой что (х) = λx. Из этого векторного равенства вытекают следующие матричные равенства:
[(х)] = [λx] M()[x] = λ[x] M()[x] – λE[x] = [0]
(M() – λE)[x] = [0]. ()
Равенство () является матричной формой записи однородной системы линейных уравнений с основной матрицей M() – λE, причем эта система по условию имеет ненулевые решения. Условие существования ненулевых решений – равенство нулю определителя основной матрицы системы, следовательно, выполнятся равенство: |M() – λE| = 0, из которого следует, что λ – собственное значение матрицы M() линейного оператора (х) = λx.
Обратно, пусть λ – собственное значение матрицы M() линейного оператора , то есть |M() – λE| = 0. Из этого равенства следует, что система однородных линейных уравнений () имеет ненулевые решения. Следовательно, существует ненулевой вектор x, такой что (х) = λx и λ – собственное значение линейного оператора .
9.7.4. Алгоритм нахождения собственных векторов линейного оператора
Найти собственные значения линейного оператора как собственные значения его матрицы

Для каждого из найденных собственных значений 0 находим собственные векторы, решая однородную систему линейных уравнений () с основной матрицей M() – λ0E.
Множество
 равно
линейной оболочке
фундаментального
набора решений этой системы за исключением
нулевого вектора.
равно
линейной оболочке
фундаментального
набора решений этой системы за исключением
нулевого вектора.
Пример 9.7.
Найти собственные
векторы
линейного
оператора с матрицей M() =  .
.
Решение. Находим собственные значения матрицы линейного оператора, для чего решаем уравнение |M() – λE| = 0.
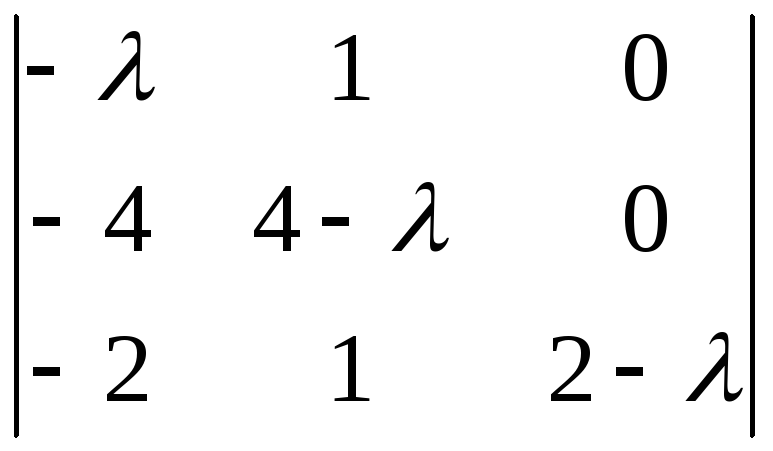 = (2–)(–1)3 + 3
= (2–)(–1)3 + 3![]() = (2 – )((–)(4 – ) – (–4)) =
= (2 – )((–)(4 – ) – (–4)) =
= (2 – )(2 – 4 + 4) = (2 – )( – 2)2 = (2 – )3 = 0 1 = 2 = 3 = 2.
Итак, получили f(λ) = (2 – )3 – характеристический многочлен матрицы M(); (2 – )3 = 0 – характеристическое уравнение матрицы M(); 1 = 2 = 3 = 2 – собственные значения матрицы M(), т. е. это собственные значения линейного оператора .
Собственное
значение у этого линейного оператора
только одно, поэтому решаем только одну
однородную
систему
линейных
уравнений
с
матрицей
 .
.
![]() .
.
Выпишем
общее
решение этой системы х1 = ![]() (х2 + 0х3)
и составим фундаментальный набор решений
(х2 + 0х3)
и составим фундаментальный набор решений
|
|
х1 |
х2 |
х3 |
|
с1 |
1 |
2 |
0 |
|
с1 |
0 |
0 |
1 |
с1 = (1, 2, 0), с2 = (0, 0, 1).
Ответ.
Множество собственных векторов с
собственным значением
λ = 2
это множество L = L(с1,
с2)\{o} = {k1c1 + k2c2,
![]() }.
}.
9.7.5.Условия, при которых матрица подобна диагональной матрице
Пусть A – квадратная матрица. Можно считать, что это матрица некоторого линейного оператора, заданного в каком-то базисе. Известно, что в другом базисе матрица линейного оператора примет другой вид, в частности, как в одном из предыдущих примеров 9.3, диагональный. Это значит, что исходная матрица подобна диагональной матрице. Возникает вопрос: всегда ли данная матрица подобна диагональной? Как это установить? Как найти соответствующий базис?
Теорема 9.14. Матрица A подобна диагональной матрице тогда и только тогда, когда линейный оператор , заданный этой матрицей, имеет n линейно независимых собственных векторов.
Доказательство.
Пусть матрица
A
подобна
диагональной матрице, то есть
у
линейного
оператора
с
матрицей
A = M()
в
некотором
базисе
с1,
с2,
…, сn
матрица примет следующий вид
M '() =  .
Используя
матрицу,
найдем
образы
базисных векторов: (с1) = 1с1,
(с2) = 2с2,
…, (сn) = nсn.
Получены n
линейно
независимых собственных векторов.
.
Используя
матрицу,
найдем
образы
базисных векторов: (с1) = 1с1,
(с2) = 2с2,
…, (сn) = nсn.
Получены n
линейно
независимых собственных векторов.
У
линейного оператора
есть
n
линейно
независимых собственных векторов с1,
с2,
…, сn
с
собственными
значениями
1,
2,
…, n.
Выберем векторы с1,
с2,
…, сn
в качестве базисных векторов и найдем
матрицу оператора
в этом базисе. Используя равенства
(с1) = 1с1,
(с2) = 2с2,
…, (сn) = nсn
составим матрицу M '():
M '() =  .
.
Теорема 9.15. Если матрица A имеет n попарно различных собственных значений, то она подобна диагональной матрице.
Это утверждение основано на свойстве собственных векторов: попарно различным собственным значениям соответствуют линейно независимые собственные векторы.
Пример 9.8. Привести матрицу A к диагональному виду, если это возможно, указать базис и матрицу перехода.