ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.08.2024
Просмотров: 547
Скачиваний: 0
СОДЕРЖАНИЕ
Т. Н. Матыцина е. К. Коржевина линейная алгебра
1.1. Множества и их элементы. Способы задания множеств
1.2. Подмножества. Диаграммы Эйлера – Венна
1.3. Операции над множествами и их свойства
2. Пересечение (или произведение).
4. Декартовое произведение (или прямое произведение).
Свойства операций над множествами
1.4. Метод математической индукции
Операции над комплексными числами
Геометрическая интерпретация комплексных чисел
Тригонометрическая форма комплексного числа
Действия над комплексными числами в тригонометрической форме
4. Извлечение корня n-ой степени.
Показательная форма комплексного числа
Способы задания бинарных отношений
Операции над бинарными отношениями
2.2. Свойства бинарных отношений
2.3. Отношение эквивалентности
3. Матрицы и действия над ними
3.2. Основные операции над матрицами и их свойства
3.2.1. Сложение однотипных матриц
3.2.2. Умножение матрицы на число
4. Определители квадратных матриц
4.1. Определители матриц второго и третьего порядка
4.2. Определитель матрицы n-го порядка
4.4. Практическое вычисление определителей
5. Ранг матрицы. Обратная матрица
5.2. Нахождение ранга матрицы методом окаймления миноров
5.3. Нахождение ранга матрицы с помощью элементарных преобразований
5.4. Понятие обратной матрицы и способы ее нахождения
Алгоритм нахождения обратной матрицы
Нахождение обратной матрицы с помощью элементарных преобразований
6.1. Основные понятия и определения
6.2. Методы решения систем линейных уравнений
6.3. Исследование системы линейных уравнений
6.4. Однородные системы линейных уравнений
Свойства решений однородной системы линейных уравнений
Фундаментальный набор решений однородной системы линейных уравнений
7. Арифметическое n-мерное векторное пространство
7.2. Линейная зависимость и независимость системы векторов
Свойства линейной зависимости системы векторов
Две теоремы о линейной зависимости
7.3. Базис и ранг системы векторов
8. Векторные (линейные) пространства
8.1. Определение векторного пространства над произвольным полем.
Простейшие свойства векторных пространств
Линейная зависимость и независимость системы векторов
8.2. Подпространства. Линейные многообразия
Пересечение и сумма подпространств
8.3. Базис и размерность векторного пространства
8.3.1. Конечномерные векторные пространства
Базис конечномерного векторного пространства
8.3.2. Базисы и размерности подпространств
8.3.3. Координаты вектора относительно данного базиса
8.3.4. Координаты вектора в различных базисах
8.4 Евклидовы векторные пространства
Скалярное произведение в координатах
Скалярное произведение в ортонормированном базисе
Ортогональное дополнение подпространства
9.1. Основные понятия и способы задания линейных операторов
Способы задания линейных операторов
9.2. Матрица линейного оператора Связь между координатами вектора и координатами его образа
Матрицы линейного оператора в различных базисах
Свойства отношения подобия матриц
9.4. Действия над линейными операторами
1. Сложение линейных операторов.
Свойства сложения линейных операторов
9.5. Ядро и образ линейного оператора
9.6. Обратимые линейные операторы
9.7. Собственные векторы линейного оператора
9.7.1. Свойства собственных векторов
9.7.2. Характеристический многочлен матрицы
9.7.3. Нахождение собственных векторов линейного оператора
9.7.4. Алгоритм нахождения собственных векторов линейного оператора
9.7.5.Условия, при которых матрица подобна диагональной матрице
10. Жорданова нормальная форма матрицы линейного оператора
10.2. Жорданова нормальная форма
10.3.Приведение матрицы к жордановой (нормальной) форме
Алгоритм приведения матрицы a к жордановой форме
11. Билинейные и квадратичные формы
Преобразование матрицы билинейной формы при переходе к новому базису. Ранг билинейной формы
Приведение квадратичной формы к каноническому виду
Закон инерции квадратичных форм
Классификация квадратичных форм
Необходимое и достаточное условие знакоопределенности квадратичной формы
Необходимое и достаточное условие знакопеременности квадратичной формы
Необходимое и достаточное условие квазизнакопеременности квадратичной формы
Правило составления выражения для определителя третьего порядка строится следующим образом. Из членов, входящих со знаком «+», один будет произведением элементов главной диагонали, каждый из двух других – произведением элементов, лежащих на параллели к этой диагонали, с добавлением третьего множителя из противоположного угла матрицы (рис. 4.1). Члены, входящие со знаком «–», строятся таким же, образом относительно другой диагонали.
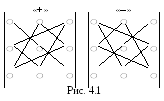
Существует еще вторая схема правила Саррюса: к определителю приписывают справа два первых столбца и вычисляют сумму произведений элементов расположенных на главной диагонали и «прямых», параллельных ей, со знаком минус вычисляют сумму произведений элементов, расположенных на побочной диагонали, и «прямых», параллельных ей.
 = а11а22а33 + а12а23а31 + а13а21а32 – а13а22а31 – а11а23а32 – а12а21а33.
= а11а22а33 + а12а23а31 + а13а21а32 – а13а22а31 – а11а23а32 – а12а21а33.
Пример 4.3.
Если дана матрица третьего порядка
А =  ,
то определитель этой матрицы
|A| =
,
то определитель этой матрицы
|A| =  = 130 + 102 + (–5)(–2)(–2) – (–5)31 – 12(–2) –
– 00(–2) = –20 + 15 + 4 = –1.
= 130 + 102 + (–5)(–2)(–2) – (–5)31 – 12(–2) –
– 00(–2) = –20 + 15 + 4 = –1.
4.2. Определитель матрицы n-го порядка
Для того чтобы дать определение определителя произвольного порядка, введем некоторые понятия. Пусть аij – элемент определителя порядка n, где i, j = 1, 2, …, n.
Определение 4.4. Минором элемента аij называется определитель Mij, полученный из данного определителя вычеркиванием i-ой строки и j-го столбца.
Из определения следует, что минор элемента – это определитель (n – 1) порядка.
Определение 4.5. Алгебраическим дополнением элемента аij называется его минор, взятый со знаком (–1)i + j, т. е. Аij = (–1)i + jMij.
Для определения понятия определителя n-го порядка воспользуемся индукцией по n, где n – порядок матрицы A.
Определение 4.6.
1. При n = 1 матрица А состоит из одного числа: |A| = а11.
2. Пусть для матрицы порядка (n – 1) определитель известен.
3. Определителем
матрицы А
произвольного порядка n
называется число, находящееся по формуле:
|A| = ![]() ,
где суммирование распространяется на
все элементы матрицы А.
,
где суммирование распространяется на
все элементы матрицы А.
Эта формула сводит вычисление определителей порядка n к вычислению определителей порядка (n – 1).
4.3. Свойства определителей
Для того чтобы вычислять определители порядков, больших, чем 3, используют свойства определителей и теорему Лапласа.
Теорема 4.1 (Лапласа). Определитель квадратной матрицы равен сумме произведений элементов любой строки (столбца) на их алгебраические дополнения, т. е.
= аi1Аi1 + аi2Аi2 + … + аinАin, где i = 1, 2, …, n (разложение определителя по элементам i-ой строки);
= а1jА1j + а2jА2j + … + аnjАnj, где j = 1, 2, …, n (разложение определителя по элементам j-го столбца).
Перечислим основные свойства определителей.
1. Если какая-либо строка (столбец) матрицы состоит из одних нулей, то определитель этой матрицы равен нулю.
2. Определитель диагональной матрицы равен произведению ее диагональных элементов.
3. Определитель треугольной (верхнетреугольной или нижнетреугольной) матрицы равен произведению элементов ее главной диагонали.
4. При перестановке двух строк (столбцов) матрицы ее определитель меняет знак на противоположный.
5. Если квадратная матрица содержит две одинаковые строки (столбца), то ее определитель равен нулю.
6. Если все элементы какой- либо строки (столбца) определителя умножить на некоторое число k, то определитель умножается на это число k. (Общий множитель элементов строки (столбца) можно выносить за знак определителя.)
7. Если квадратная матрица содержит две пропорциональные строки (столбца), то ее определитель равен нулю.
8. Определитель матрицы не изменится, если к элементам какой-либо строки (столбца) матрицы прибавить элементы другой строки (столбца) матрицы, предварительно умноженные на одно и то же число.
9. При транспонировании матрицы ее определитель не меняется.
10. Определитель произведения двух квадратных матриц равен произведению их определителей.
11. Сумма произведений элементов какой-либо строки (столбца) матрицы на алгебраические дополнения элементов другой строки (столбца) этой матрицы равна нулю.
4.4. Практическое вычисление определителей
Один из способов вычисления определителей порядка выше трех – разложение его по какому-либо столбцу или строке.
Пример 4.4.
Вычислить
определитель = 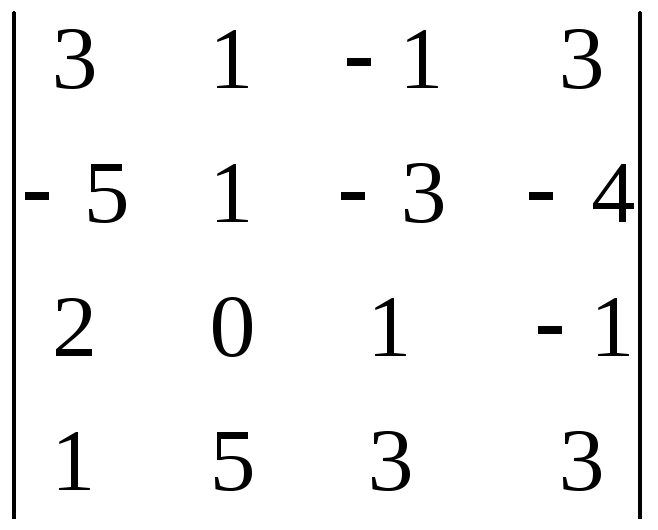 .
.
Решение. Разложим данный определитель по третьей строке:
 = а31А31 + а32А32 + а33А33 + а34А34 =
= а31А31 + а32А32 + а33А33 + а34А34 =
= 2(–1)3 + 1М31 ++ 0(–1)3 + 2М32 + 1(–1)3 + 3М33 + (–1)(–1)3 + 4М34 =
= 21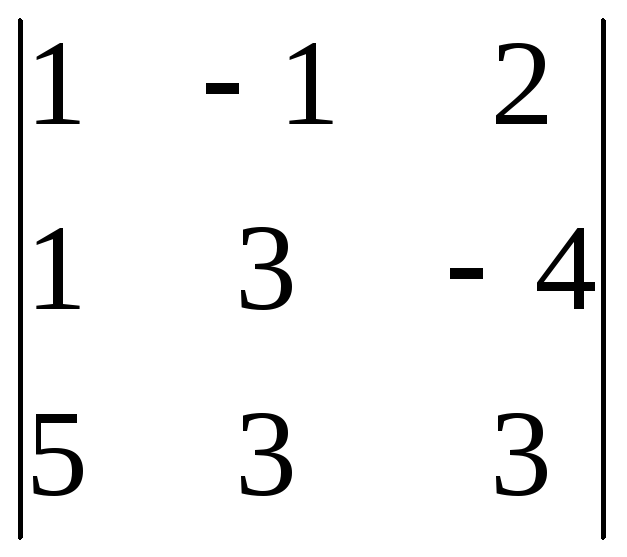 + 0 + 11
+ 0 + 11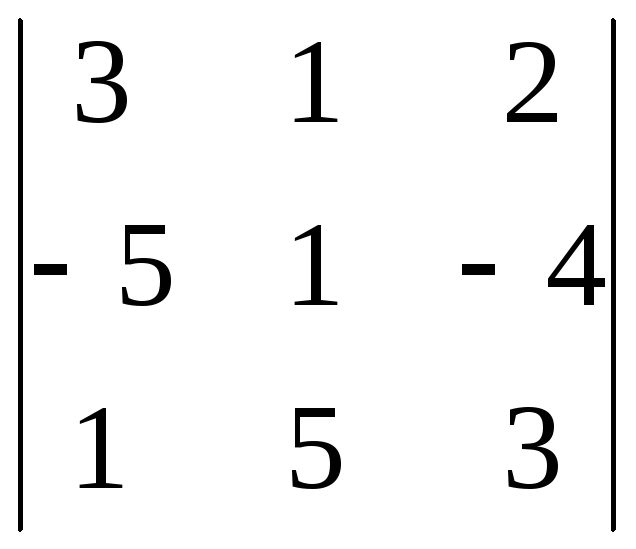 + (–1)(–1)
+ (–1)(–1)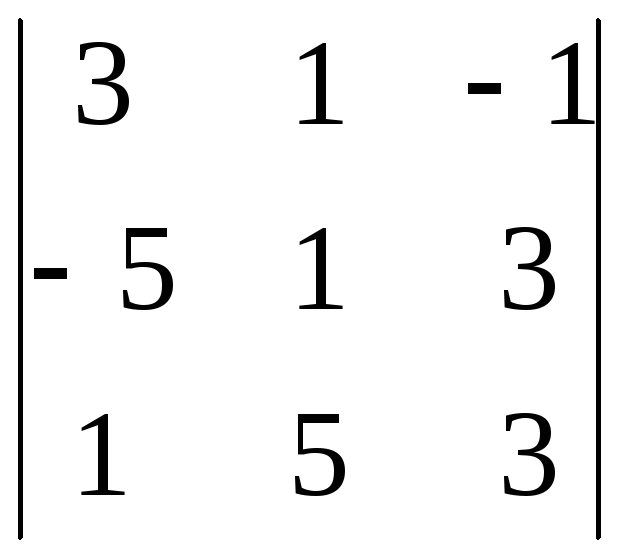 =
=
= 2(9 + 20 + 6 – 30 + 12 + 3) + (9 – 4 – 50 – 2 + 60 + 15) + (9 + 3 + 25 + 1 – – 45 + 15) = 40 + 28 + 8 = 76.
При вычислении определителей целесообразно так преобразовать исходную матрицу с помощью свойств определителей, чтобы в преобразованной матрице получилась строка (столбец), содержащая максимальное число нулей («обнулить» строку), а потом найти определитель разложением по этой строке (столбцу). В ходе преобразований необходимо следить за тем, чтобы значение определителя не менялось.
Пример 4.5.
Вычислить
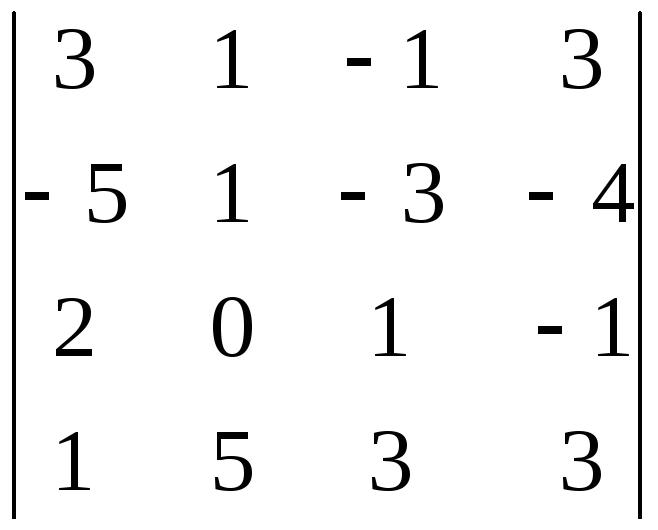
определитель четвертого порядка:
= 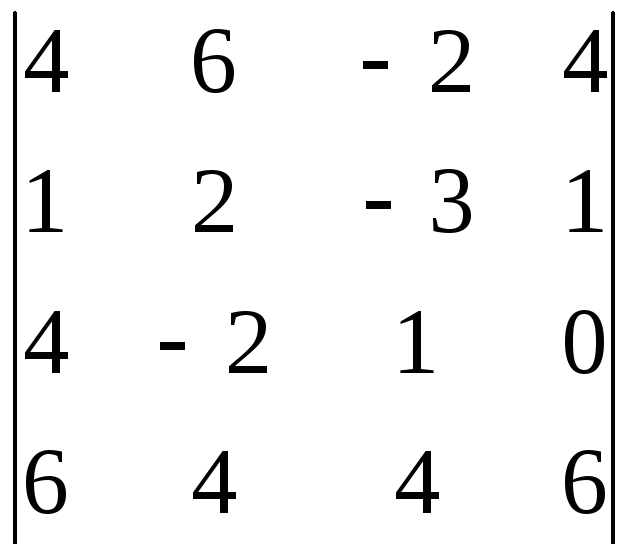 .
.
Решение. В третьей строке уже есть один ноль. Если к 1-ому столбцу прибавить 3-ий, умноженный на (-4), а ко 2-му столбцу прибавить 3-ий, умноженный на 2, то получим следующий определитель, который разложим по элементам 3-ей строки (теорема Лапласа):
 = а33(–1)3 + 3M33 = 1(–1)3 + 3
= а33(–1)3 + 3M33 = 1(–1)3 + 3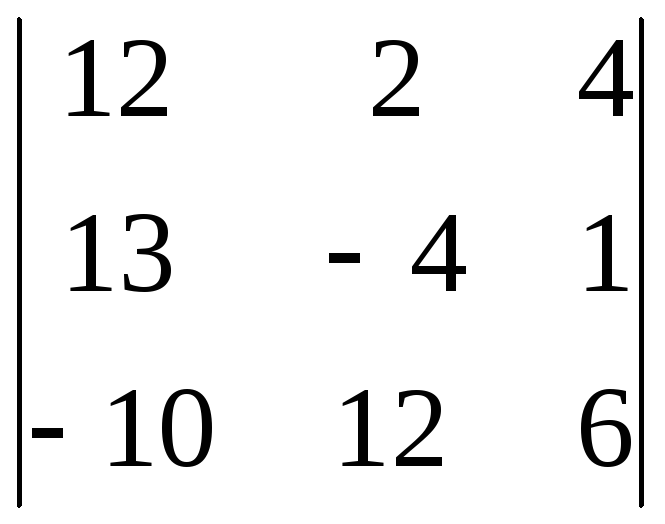 .
.
Полученный
определитель можно вычислить по правилу
треугольника или продолжить упрощение
матрицы с последующим применением
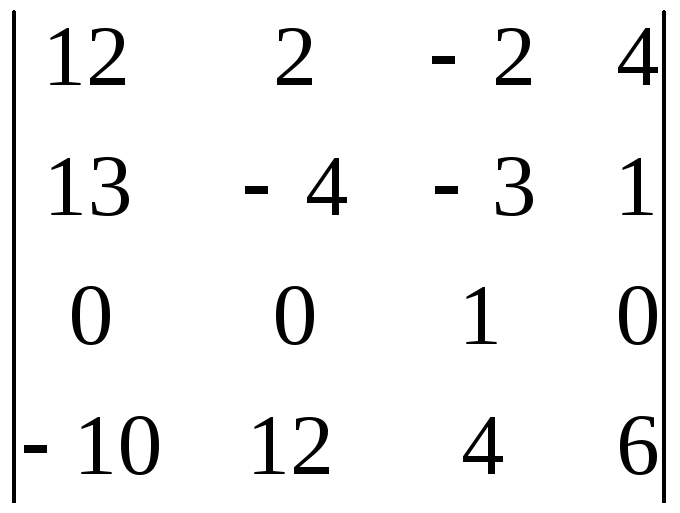
теоремы Лапласа. Прибавим к 1-ой строке
2-ую, умноженную на (–4), а к 3-ей строке
2-ую, умноженную на (–6), и получим такой
определитель:
 = 1(–1)2 + 3
= 1(–1)2 + 3
![]() = –144.
= –144.