ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.08.2024
Просмотров: 525
Скачиваний: 0
СОДЕРЖАНИЕ
Т. Н. Матыцина е. К. Коржевина линейная алгебра
1.1. Множества и их элементы. Способы задания множеств
1.2. Подмножества. Диаграммы Эйлера – Венна
1.3. Операции над множествами и их свойства
2. Пересечение (или произведение).
4. Декартовое произведение (или прямое произведение).
Свойства операций над множествами
1.4. Метод математической индукции
Операции над комплексными числами
Геометрическая интерпретация комплексных чисел
Тригонометрическая форма комплексного числа
Действия над комплексными числами в тригонометрической форме
4. Извлечение корня n-ой степени.
Показательная форма комплексного числа
Способы задания бинарных отношений
Операции над бинарными отношениями
2.2. Свойства бинарных отношений
2.3. Отношение эквивалентности
3. Матрицы и действия над ними
3.2. Основные операции над матрицами и их свойства
3.2.1. Сложение однотипных матриц
3.2.2. Умножение матрицы на число
4. Определители квадратных матриц
4.1. Определители матриц второго и третьего порядка
4.2. Определитель матрицы n-го порядка
4.4. Практическое вычисление определителей
5. Ранг матрицы. Обратная матрица
5.2. Нахождение ранга матрицы методом окаймления миноров
5.3. Нахождение ранга матрицы с помощью элементарных преобразований
5.4. Понятие обратной матрицы и способы ее нахождения
Алгоритм нахождения обратной матрицы
Нахождение обратной матрицы с помощью элементарных преобразований
6.1. Основные понятия и определения
6.2. Методы решения систем линейных уравнений
6.3. Исследование системы линейных уравнений
6.4. Однородные системы линейных уравнений
Свойства решений однородной системы линейных уравнений
Фундаментальный набор решений однородной системы линейных уравнений
7. Арифметическое n-мерное векторное пространство
7.2. Линейная зависимость и независимость системы векторов
Свойства линейной зависимости системы векторов
Две теоремы о линейной зависимости
7.3. Базис и ранг системы векторов
8. Векторные (линейные) пространства
8.1. Определение векторного пространства над произвольным полем.
Простейшие свойства векторных пространств
Линейная зависимость и независимость системы векторов
8.2. Подпространства. Линейные многообразия
Пересечение и сумма подпространств
8.3. Базис и размерность векторного пространства
8.3.1. Конечномерные векторные пространства
Базис конечномерного векторного пространства
8.3.2. Базисы и размерности подпространств
8.3.3. Координаты вектора относительно данного базиса
8.3.4. Координаты вектора в различных базисах
8.4 Евклидовы векторные пространства
Скалярное произведение в координатах
Скалярное произведение в ортонормированном базисе
Ортогональное дополнение подпространства
9.1. Основные понятия и способы задания линейных операторов
Способы задания линейных операторов
9.2. Матрица линейного оператора Связь между координатами вектора и координатами его образа
Матрицы линейного оператора в различных базисах
Свойства отношения подобия матриц
9.4. Действия над линейными операторами
1. Сложение линейных операторов.
Свойства сложения линейных операторов
9.5. Ядро и образ линейного оператора
9.6. Обратимые линейные операторы
9.7. Собственные векторы линейного оператора
9.7.1. Свойства собственных векторов
9.7.2. Характеристический многочлен матрицы
9.7.3. Нахождение собственных векторов линейного оператора
9.7.4. Алгоритм нахождения собственных векторов линейного оператора
9.7.5.Условия, при которых матрица подобна диагональной матрице
10. Жорданова нормальная форма матрицы линейного оператора
10.2. Жорданова нормальная форма
10.3.Приведение матрицы к жордановой (нормальной) форме
Алгоритм приведения матрицы a к жордановой форме
11. Билинейные и квадратичные формы
Преобразование матрицы билинейной формы при переходе к новому базису. Ранг билинейной формы
Приведение квадратичной формы к каноническому виду
Закон инерции квадратичных форм
Классификация квадратичных форм
Необходимое и достаточное условие знакоопределенности квадратичной формы
Необходимое и достаточное условие знакопеременности квадратичной формы
Необходимое и достаточное условие квазизнакопеременности квадратичной формы
3.2. Основные операции над матрицами и их свойства
3.2.1. Сложение однотипных матриц
Складывать можно только однотипные матрицы.
Определение 3.12. Суммой двух матриц А = (aij) и B = (bij), где i = 1, 2, …, m, j = 1, 2, …, n называется матрица С = (сij) для которой сij = aij + bij, где i = 1, 2, …, m, j = 1, 2, …, n. Обозначение: С = А + B.
Иначе говоря: сложение матриц производится поэлементно.
Пример 3.1.
Для матриц А = ![]() и В =
и В = ![]() найти их сумму.
найти их сумму.
Решение.
С = А + B = ![]() +
+ ![]() =
= ![]() .
.
Свойства сложения матриц
коммутативность: А, В : А + В = В + А;
ассоциативность: А, В, С : (А + В) + С = А + (В + С);
А, А + О = А, где О – нулевая матрица;
А, –А : А + (–А) = О, (–А) – матрица, противоположная матрице А.
Замечание 3.1. Пусть А = (aij) тогда –А = (–aij), где элемент –aij – противоположный элементу aij для любых индексов i и j, при этом матрица –А называется противоположной к матрице А.
Пример 3.2.
Пусть А = ![]() тогда –А =
тогда –А = ![]() .
.
3.2.2. Умножение матрицы на число
Определение 3.13. Произведением матрицы А = (aij) на действительной число k называется матрица С = (сij), для которой сij = kaij, где i = 1, 2, …, m, j = 1, 2, …, n. Обозначение: С = kА = kА, т. о. каждый элемент матрицы А умножают на действительное число k.
Пример 3.3.
Пусть дано число k = –2
и матрица А = ![]() ,
тогда
kА = (–2)
,
тогда
kА = (–2)![]() =
= ![]() .
.
Свойства умножения матрицы на число
А : 1А = А;
α, β R, А : (αβ)А = α(βА) = β(αА);
α R, А, В : α(А + В) = αА + αВ;
α, β R, А : (α + β)А = αА + βА.
3.2.3. Умножение матриц
Определим умножение двух матриц; для этого необходимо ввести некоторые дополнительные понятия.
Определение 3.14. Матрицы А и В называются согласованными, если число столбцов матрицы А равно числу строк матрицы В.
Например матрицы А размерности m n и В размерности n p будут согласованными.
Обозначим строки матрицы А как А1, А2, …, Аm, а столбцы матрицы В как B1, B2, …, Bp. При этом в строке матрицы А столько же элементов, сколько в столбце матрицы В. Это условие позволяет умножать строку матрицы А на столбец матрицы В.
Умножим,
например, А1
на столбец B1.
Пусть А1 = (а1 а2 … аn),
B1 = ![]() тогда
А1B1 = (а1 а2 … аn)
тогда
А1B1 = (а1 а2 … аn)![]() = а1b1 + а2b2 + … + аnbn.
= а1b1 + а2b2 + … + аnbn.
Пример 3.4.
Умножим строку (1 2 3 4) на столбец
![]() .
(1 –2 3 4)
.
(1 –2 3 4)![]() = (13 + (–2)2 + 31 + 40) = (2).
= (13 + (–2)2 + 31 + 40) = (2).
Теперь можно определить умножение матриц.
Определение 3.15. Произведением согласованных матриц А размерности m n и В размерности n p называется матрица С = (сij) размерности m p, для которой сij = АiBj, где i = 1, 2, …, m, j = 1, 2, …, p.
Обозначение:
С = AB = 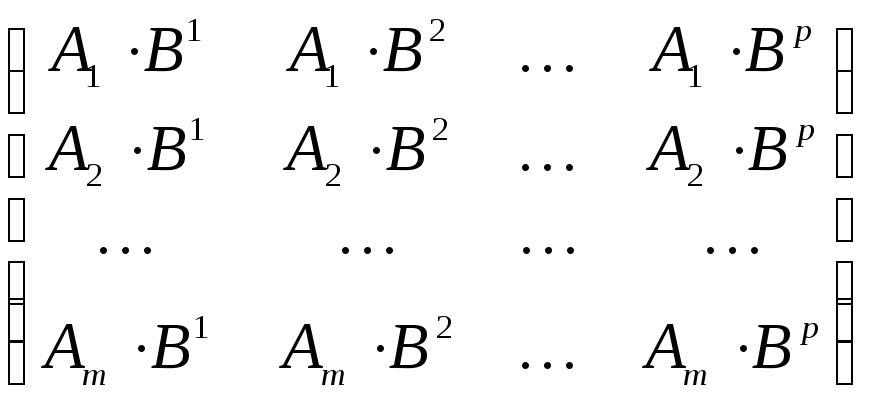 .
.
Пример 3.5.
Найти произведение матриц АВ,
где А =  ,
В =
,
В = ![]() .
.
Решение.
Матрицы А32
и В24
согласованы,
значит можно найти произведение этих
матриц АВ,
результатом будет матрица размерности
3 4.
АВ = 
![]() =
=
= 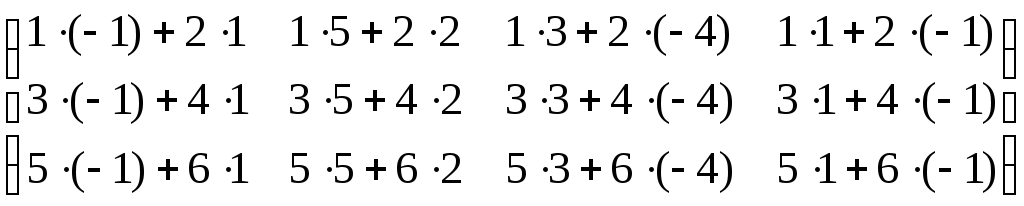 =
= 
Свойства умножения матриц
Умножение матриц не коммутативно: AB ≠ BA.
Продемонстрировать данное свойство можно на примерах.
Пример 3.6.
а) Пусть
даны две матрицы: А = ![]() и В =
и В = ![]() .
Перемножим матрицы AB =
.
Перемножим матрицы AB = ![]()
![]() =
= ![]() =
= ![]() ,
получим матрицу размерности 2 1.
Умножить матрицу В = В21
на матрицу А = А22
нельзя, так как эти матрицы не согласованные.
Т. о. свойство коммутативности для
умножения двух матриц не выполняется.
,
получим матрицу размерности 2 1.
Умножить матрицу В = В21
на матрицу А = А22
нельзя, так как эти матрицы не согласованные.
Т. о. свойство коммутативности для
умножения двух матриц не выполняется.
б) Возьмем
две матрицы так, чтобы А
и В
были согласованы и чтобы также В
и А
были согласованные. Проверим, что при
данных условиях свойство коммутативности
также не выполняется. Пусть А = А23 = ![]() и В = В32 =
и В = В32 =  ,
найдем их произведения.
,
найдем их произведения.
AB = ![]()
 =
= ![]() = С22;
= С22;
ВА = 
![]() =
=  = С33.
= С33.
Ассоциативность: (AB)С = А(ВС).
Для любой квадратной матрицы А и согласованной с ней единичной матрицы Е справедливо равенство: AЕ = ЕA.
Дистрибутивный закон умножения матриц относительно сложения матриц: А, В, С : (A + B)С = (АС) + (ВС) и A(B + С) = (АВ) + (АС).
Пример 3.7.
Пусть даны матрицы А = ![]() ,
В =
,
В = ![]() и С =
и С = ![]() проверим справедливость свойства 4.
проверим справедливость свойства 4.
(A + B)С = ![]() +
+ ![]()
![]() =
= ![]()
![]() =
= ![]() ;
;
(АС) + (ВС) = ![]()
![]() +
+ ![]()
![]() =
= ![]() +
+ ![]() =
= ![]() .
.
k R, А, В : k(АВ) = (kА)В = А(kВ).
3.3. Транспонирование матриц
Определение 3.16. Матрица Аt, полученная из данной заменой каждой ее строки столбцом с тем же номером, называется транспонированной к данной матрице А.
Если A – матрица размерности m n, то Аt – матрица размерности n m.
При транспонировании верны следующие равенства:
(А + В)t = Аt + Вt;
(kA)t = kАt;
(AB)t = ВtАt.
4. Определители квадратных матриц
4.1. Определители матриц второго и третьего порядка
Каждой
квадратной матрице А
порядка n
ставится в соответствие число, которое
называется определителем
этой матрицы. Обозначение: ,
|A|,
det A,
 .
.
Определение 4.1. Определителем матрицы первого порядка А = (а11) называется число а11.
Пример 4.1. Например: если дана матрица первого порядка А = (3), то определитель этой матрицы |A| = 3.
Определение 4.2.
Определителем
матрицы второго порядка
А =  называется число, которой находится по
формуле: |A| =
называется число, которой находится по
формуле: |A| = ![]() = а11а22 – а12а21.
= а11а22 – а12а21.
Пример 4.2.
Если
дана матрица второго порядка А = ![]() ,
то определитель этой матрицы
|A| =
,
то определитель этой матрицы
|A| = ![]() = 14 – 23 = 4 – 6 = –2.
= 14 – 23 = 4 – 6 = –2.
Определение 4.3.
Определителем
матрицы третьего порядка
А =  называется число, которой находится по
формуле:
|A| = а11а22а33 + а12а31а23 + а21а13а32 – а13а22а31 – а11а32а23 – а33а21а12.
называется число, которой находится по
формуле:
|A| = а11а22а33 + а12а31а23 + а21а13а32 – а13а22а31 – а11а32а23 – а33а21а12.
Это число состоит из шести слагаемых, в каждое слагаемое в качестве множителей входит по одному элементу из каждой строки и каждого столбца. Для запоминания формулы можно воспользоваться наглядным правилом знаков для выписывания произведений, входящих в разложение определителя третьего порядка. Схема на рис. 4.1 называется правилом треугольника или правилом Саррюса10.