ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 31.03.2024
Просмотров: 1091
Скачиваний: 0
СОДЕРЖАНИЕ
Математическое моделирование элементов сложных экологических систем
Лекция 1. Введение в моделирование. Исторический экскурс.
1. Основы моделирования в экологии 1.1. Общие принципы построения моделей в экологии
2.2. Этапы построения математической модели
1.4. Элементы теории подобия, применяемые в моделировании
3.2.2. Выборочный метод в экологометрике.
Зависимость числа интервалов от объема выборки
Статистический ряд по интервалам
Лекция 4. Статистические оценки параметров распределения случайных величин по выборкам
4.4. Статистические оценки гипотез об экологических моделях
Выборка из генеральной совокупности
Статистическая таблица эксперимента
Пример преобразования членов уравнения регрессии
Вычисление данных для линеаризации уравнения регрессии
Нормальные уравнения мнк для некоторых функций
Статистическое оценивание уравнения регрессии и парной корреляции.
Обработка результатов наблюдений
Рекомендации по выбору вида функции
3.4. Динамические статистические модели
Данные по объему сброса качественных сточных вод
Данные по объему сброса сточных вод за 5-летие
Пример расчета 5-летних средних
Расчетные значения для определения уравнения динамики
Ряд динамики для определения сезонных колебаний
Эксперименталъный материал исследования
8.1. Анализ влияния отдельных факторов в экологической модели.
Лекция 9. Методы оптимизации. Метод Лагранжа
Лекция 10. Метод линейного программирования.
Лекция 11. Функциональные модели.
Лекция 12. Модели процессов содержащие обыкновенные дифференциальные уравнения.
Численные ошибки использованных для вычисления данных
Лекция 13. Статистические модели динамики.
Лекция 16. Информационные технологии в экологии. Экологические информационные системы.
1 6.1. Экологические информационные системы
1. Какова область значения для числовых характеристик?
Лекция 17. Использование информационных технологий для решения задач экологии.
Критические значения коэффициента корреляции rk;α
2.1. Подобие физических явлений и его признаки
2.4. Применение методов подобия в математическом
11.3. Численные методы решения дифференциальных уравнений
11.3.2. Процесс численного решения
11.3.4. Модифицированный метод Эйлера
11.3.6. Метод Рунге – Кутта для систем дифференциальных уравнений
11.3.7. Общая характеристика одношаговых методов
11.3.9. Методы прогноза и коррекции
11.3.10. Краткая характеристика методов прогноза и коррекции.
11.3.11. Выбор шага и погрешность решения.
11.4. Имитационное моделирование систем
11.4.1. Принципы имитационного моделирования
11.4.3. Динамическая модель исследуемого объекта
11.4.4. Построение имитационных моделей динамических систем
11.4.5. Преобразование передаточных функций звеньев в дифференциальные уравнения в форме Коши
11.4.6. Синтез имитационной модели на основе структурной схемы
11.5. Теоретические основы построения математических моделей систем
11.5.1. Компонентные и топологические уравнения
11.5.2. Компонентные и топологические уравнения механической системы
11.5.3. Компонентные и топологические уравнения электрической системы
11.5.4. Компонентные и топологические уравнения гидравлической системы
11.5.5. Компонентные и топологические уравнения тепловой системы
11.6.1. Сущность метода электроаналогий.
11.6.2. Электромеханические аналогии
11.6.3. Построение имитационных моделей методом электроаналогий
11.6.4. Плоское прямолинейное движение звеньев
11.6.5. Электрогидравлические аналогии
Расстояние xk , на котором упадет снаряд, зависит от целого ряда факторов: массы снаряда, начальной скорости, гравитационных сил и т.д.
Математическая модель этой задачи выводится из второго закона Ньютона:
![]() (3.1)
(3.1)
где m - масса снаряда; F - результирующая действующих на снаряд сил.
На снаряд действуют две силы:
1) cила сопротивления воздуха
![]() (3.2)
(3.2)
где C - коэффициент сопротивления; ρ - плотность воздуха; S - поперечное сечение снаряда;
2) сила гравитации
F2 = -mg, (3.3)
где g - ускорение свободного падения.
Чтобы записать уравнение (3.1) в переменных x и y , заметим, что сила сопротивления F1 действует вдоль оси снаряда, а сила гравитации F2 только в вертикальном направлении. Поэтому уравнение (3.1) можно записать покоординатно следующим образом:
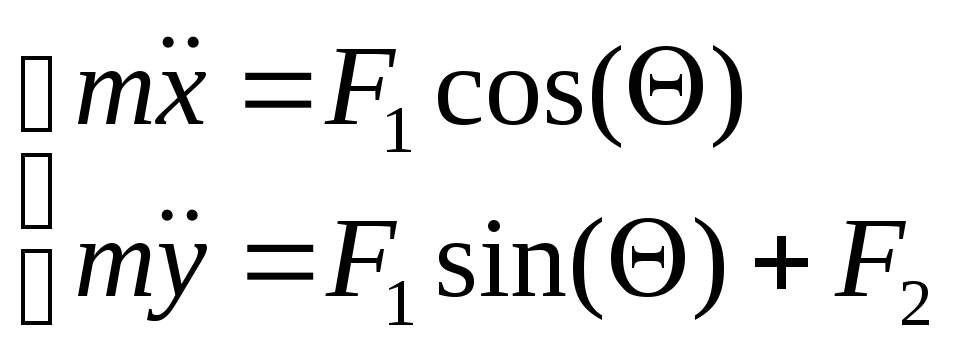 (3.4)
(3.4)
Используя (3.2), (3.3) и меняя порядок членов, перепишем
уравнения (3.4) в виде:
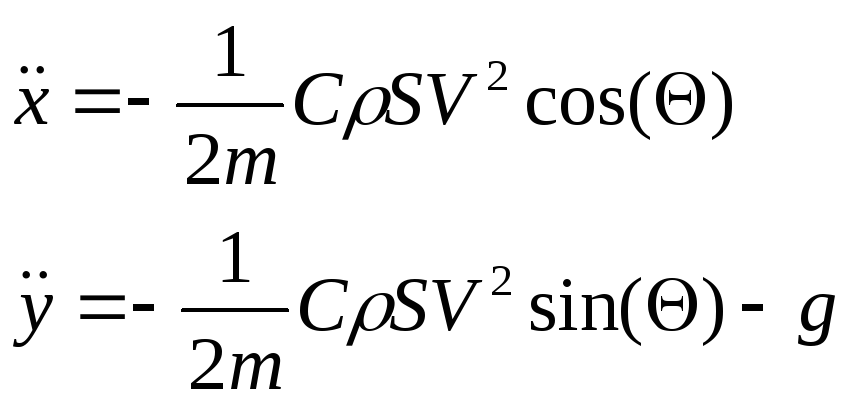 (3.5)
(3.5)
Для численного решения необходимо преобразовать два уравнения второго порядка (3.5) в систему четырех уравнений первого порядка. Дифференцируя соотношение
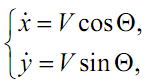 (3.6)
(3.6)
Имеем
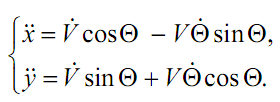 (3.7)
(3.7)
Подставляя теперь
выражения (3.7) в уравнение (3.5) и разрешая
последние относительно
![]() и
и
![]() ,
получаем
,
получаем
 (3.8)
(3.8)
Уравнения (3.6) вместе с (3.8) составляют систему четырех нелинейных уравнений первого порядка относительно функций x, y,V, θ. Это связанная система нелинейных дифференциальных уравнений, явное решение которых невозможно и возникает необходимость в приближенном численном решении на ЭВМ. Решение системы (3.6), (3.8) должно удовлетворять четырем необходимым начальным условиям.
Считаем, что снаряд выпускается в момент времени t = 0, так что
(x0) = 0,
(y0) = 0.
Другие два начальных условия даются соотношениями
Следовательно, в данном случае рассматривается задача Коши. При заданных характеристиках снаряда и заданном V0 имеется только один свободный параметр – угол стрельбы Q0. Его изменение будет, очевидно, приводить к изменению траектории.
11.3.2. Процесс численного решения
Когда математическая модель уже построена, обычно появляется мысль о том, нельзя ли найти решение в явной форме. Однако такое решение обычно возможно только при радикальном упрощении задачи. Убедившись в невозможности построения явного решения, мы обращаемся к разработке численного метода для его нахождения. При выборе численного метода решения приходится учитывать свойства вычислительных средств и программного обеспечения, которые имеются в нашем распоряжении.
Наиболее важным фактором в численном решении задачи является то, что компьютеры имеют дело с конечным числом цифр и символов. Ошибка, обусловленная ограниченной длиной слов вычислительной машины, называется ошибкой округления. К счастью, большинство современных ЭВМ имеют эффективную арифметику двойной точности. На некоторых машинах арифметика двойной точности реализована с помощью программного обеспечения, что в несколько раз увеличивает время счета по сравнению с вариантом одинарной точности.
Другое обстоятельство, которое приводит к погрешности численного решения, связано с необходимостью замены непрерывных задач дискретными задачами. Например, при вычислении интеграла на ЭВМ используются значения подынтегральной функции только в конечном числе точек. Следовательно, даже если арифметические операции будут выполняться точно, без каких-либо округлений, все равно будет существовать ошибка, обусловленная дискретной аппроксимацией интеграла.
Ошибки такого типа называют ошибками дискретизации. Эти ошибки, за исключением тривиальных случаев, всегда возникают при численном решении дифференциальных уравнений и других непрерывных задач. В основе многих численных методов лежит идея итерационного процесса. В ходе такого процесса строится последовательность приближений к решению в надежде, что эти приближения сойдутся к решению. Однако на ЭВМ можно реализовать только конечное число таких приближений, поэтому мы вынуждены останавливать решение, не достигнув математической сходимости. Ошибку, вызванную таким конечным завершением итерационного процесса, называют ошибкой сходимости.
Другим важнейшим фактором, помимо точности, рассматриваемым при разработке методов решения математических моделей на ЭВМ, является эффективность. Под этим мы понимаем количество времени, которое необходимо затратить для решения данной задачи на ЭВМ.
Остановимся на методах решения задачи Коши [4], [9], [10]:
1) Одношаговые методы, в которых для нахождения следующей точки на кривой y = f (x) требуется информация лишь об одном предыдущем шаге. Одношаговыми являются:
- метод Эйлера;
- методы Рунге-Кутта.
2) Методы прогноза и коррекции (многошаговые), в которых для отыскания следующей точки кривой y = f (x) требуется информация более чем об одной из предыдущих точек. Чтобы получить достаточно точное численное значение, часто прибегают к итерации.
К числу таких методов относятся методы:
- Милна;
- Адамса-Башфорта;
- Хемминга и др.
11.3.3. Метод Эйлера
Это простейший метод решения задачи Коши, позволяющий интегрировать дифференциальные уравнения первого порядка. Его точность невелика, но в некоторых случаях, например, в системах управления электроприводов, он применяется достаточно часто. На основе этого метода легче понять алгоритмы других, более эффективных методов.
Рассмотрим снова дифференциальное уравнение в форме Коши
y’ = f (t, y), (3.9)
удовлетворяющее начальному условию
y(t0) = y0. (3.10)
Численное решение задачи состоит в построении таблицы приближенных значений y1, y2 , …., yn решения уравнения (3.9) в точках t1, t2, ….,tn. Точки t1, t2, ….,tn - узлы сетки. Используем систему равноотстоящих узлов. Величина h - шаг сетки (шаг интегрирования).
Метод Эйлера основан на разложении y в ряд Тейлора в окрестности t0:
![]()
Если h мало, то члены, содержащие h во второй или более высоких степенях, являются малыми более высоких порядков и ими можно пренебречь. Тогда
![]()
y'(t0) находим из дифференциального уравнения (3.9), подставив в него начальное условие (3.10). Таким образом можно получить приближенное значение зависимой переменной при малом смещении h от начальной точки. Этот процесс можно продолжить, используя соотношение
![]()
и делая сколь угодно много шагов.
Геометрический смысл метода Эйлера заключается в аппроксимации решения на отрезке [tn, tn +1] отрезком касательной, проведенной к графику решения в точке tn (рис. 3.3). Как видно из рис. 3.3, на каждом новом шаге приближенное решение переходит на другой член семейства решений. В результате накапливается ошибка дискретизации, которая линейно зависит от h , так как члены ряда Тейлора, содержащие h во второй и более высоких степенях, отбрасываются. Поэтому метод Эйлера имеет первый порядок точности.