ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 31.03.2024
Просмотров: 1083
Скачиваний: 0
СОДЕРЖАНИЕ
Математическое моделирование элементов сложных экологических систем
Лекция 1. Введение в моделирование. Исторический экскурс.
1. Основы моделирования в экологии 1.1. Общие принципы построения моделей в экологии
2.2. Этапы построения математической модели
1.4. Элементы теории подобия, применяемые в моделировании
3.2.2. Выборочный метод в экологометрике.
Зависимость числа интервалов от объема выборки
Статистический ряд по интервалам
Лекция 4. Статистические оценки параметров распределения случайных величин по выборкам
4.4. Статистические оценки гипотез об экологических моделях
Выборка из генеральной совокупности
Статистическая таблица эксперимента
Пример преобразования членов уравнения регрессии
Вычисление данных для линеаризации уравнения регрессии
Нормальные уравнения мнк для некоторых функций
Статистическое оценивание уравнения регрессии и парной корреляции.
Обработка результатов наблюдений
Рекомендации по выбору вида функции
3.4. Динамические статистические модели
Данные по объему сброса качественных сточных вод
Данные по объему сброса сточных вод за 5-летие
Пример расчета 5-летних средних
Расчетные значения для определения уравнения динамики
Ряд динамики для определения сезонных колебаний
Эксперименталъный материал исследования
8.1. Анализ влияния отдельных факторов в экологической модели.
Лекция 9. Методы оптимизации. Метод Лагранжа
Лекция 10. Метод линейного программирования.
Лекция 11. Функциональные модели.
Лекция 12. Модели процессов содержащие обыкновенные дифференциальные уравнения.
Численные ошибки использованных для вычисления данных
Лекция 13. Статистические модели динамики.
Лекция 16. Информационные технологии в экологии. Экологические информационные системы.
1 6.1. Экологические информационные системы
1. Какова область значения для числовых характеристик?
Лекция 17. Использование информационных технологий для решения задач экологии.
Критические значения коэффициента корреляции rk;α
2.1. Подобие физических явлений и его признаки
2.4. Применение методов подобия в математическом
11.3. Численные методы решения дифференциальных уравнений
11.3.2. Процесс численного решения
11.3.4. Модифицированный метод Эйлера
11.3.6. Метод Рунге – Кутта для систем дифференциальных уравнений
11.3.7. Общая характеристика одношаговых методов
11.3.9. Методы прогноза и коррекции
11.3.10. Краткая характеристика методов прогноза и коррекции.
11.3.11. Выбор шага и погрешность решения.
11.4. Имитационное моделирование систем
11.4.1. Принципы имитационного моделирования
11.4.3. Динамическая модель исследуемого объекта
11.4.4. Построение имитационных моделей динамических систем
11.4.5. Преобразование передаточных функций звеньев в дифференциальные уравнения в форме Коши
11.4.6. Синтез имитационной модели на основе структурной схемы
11.5. Теоретические основы построения математических моделей систем
11.5.1. Компонентные и топологические уравнения
11.5.2. Компонентные и топологические уравнения механической системы
11.5.3. Компонентные и топологические уравнения электрической системы
11.5.4. Компонентные и топологические уравнения гидравлической системы
11.5.5. Компонентные и топологические уравнения тепловой системы
11.6.1. Сущность метода электроаналогий.
11.6.2. Электромеханические аналогии
11.6.3. Построение имитационных моделей методом электроаналогий
11.6.4. Плоское прямолинейное движение звеньев
11.6.5. Электрогидравлические аналогии
Наиболее часто при построении динамической модели используют метод сосредоточенных масс. Этот метод применим, если система имеет ярко выраженный дискретный спектр собственных частот. Это характерно для технических объектов, у которых масса распределена в пространстве неравномерно. Например, в механической системе автомобиля масса вращающихся
деталей в основном сосредоточена в маховике двигателя, крупных шестернях трансмиссий, колесах, имеющих большие радиальные размеры и обладающих большими моментами инерции, а соединяющие их детали (валы, муфты, карданные передачи и др.) имеют малые радиальные размеры и массу, но обладают существенными упругими свойствами. Из названия метода следует, что он предназначен для моделирования технических объектов, мерой инертности элементов которых служит масса.
При построении динамической модели выделяют сосредоточенные массы, эквивалентные массам соответствующих частей технологического объекта, и элементы, лишенные массы (невесомые), отображающие характер взаимодействия сосредоточенных масс.
С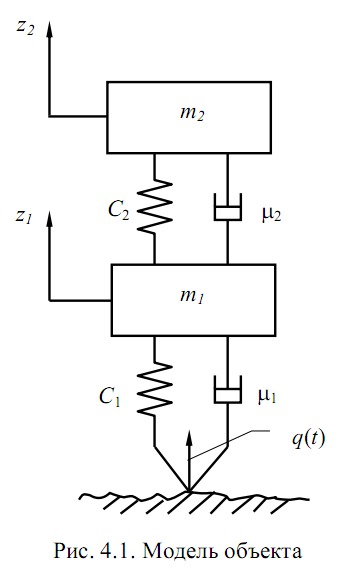 осредоточенные
массы обладают инерционными свойствами
и способностью накапливать кинетическую
энергию. Их
называют инерционными элементами.
Взаимодействие
сосредоточенных масс осуществляется
посредством упругих,
диссипативных,
фрикционных
и трансформаторных элементов.
осредоточенные
массы обладают инерционными свойствами
и способностью накапливать кинетическую
энергию. Их
называют инерционными элементами.
Взаимодействие
сосредоточенных масс осуществляется
посредством упругих,
диссипативных,
фрикционных
и трансформаторных элементов.
Упругие элементы отображают упругие свойства динамической системы. Они обладают способностью накапливать потенциальную энергию.
Диссипативные элементы отображают свойство диссипации (рассеивания энергии) конструктивными элементами технического объекта, обусловленное силами внутреннего трения, пропорциональными относительной скорости перемещения взаимодействующих сосредоточенных масс (или сосредоточенных масс относительно внешней среды, например, при движении жидкости в трубопроводе). Трансформаторные элементы отображают безинерционное преобразование параметров потока энергии, осуществляемое техническими устройствами, называемыми трансформаторами. Здесь речь идет о тех случаях, когда внутренними процессами трансформатора можно пренебречь и учитывать лишь пропорциональное изменение величины выходных переменных по отношению к величине переменных на его входе без преобразования вида энергии.
Пример
Используя метод сосредоточенных масс, построить динамическую модель для анализа плавности хода автомобиля (рис. 4.1) [13]. В связи с неровностями дороги, движение автомобиля сопровождается колебаниями кузова и вибрациями его механизмов и деталей. Для того чтобы создать нормальные условия водителю и комфортные условия пассажирам, применяют упругую подвеску автомобиля. Эта подвеска содержит упругие элементы и амортизаторы. Динамическая модель колебательной системы автомобиля имеет следующий вид. В этой модели учитывается масса части кузова m2, приходящаяся на колеса данного моста. Масса колес и моста m1.
Коэффициент сопротивления диссипативных элементов подвески m2 и шины m1. С учетом наложенных позиционных связей на сосредоточенные массы m1 и m2, они могут перемещаться только вертикально вдоль осей соответственно z1 и z2.
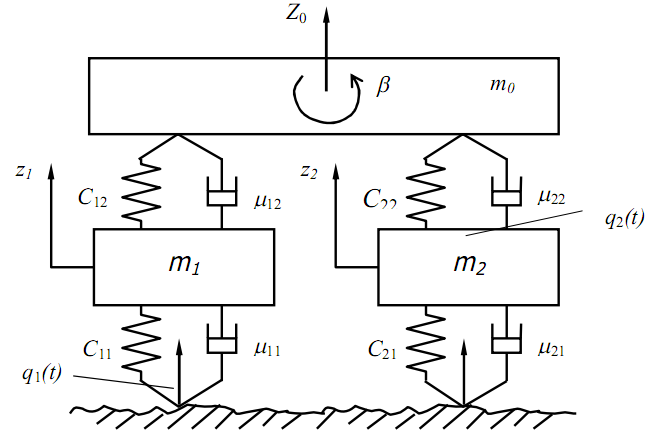
Рис. 4.2. Динамическая модель плоских колебаний
Следовательно, система имеет две степени свободы. Внешние воздействия на эту систему создаются неровностями микро- и макро профиля дороги. Эти воздействия носят случайный характер и описываются случайными функциями q(t). Однако для более детального анализа влияния параметров подвески на колебания кузова необходимо учитывать связанность колебаний. В этом случае приходим к динамической модели плоских колебаний, в которой учитываются не только вертикальные колебания кузова относительно оси z0, но и угловые колебания b относительно оси y (рис.4.2).
Колебательная система имеет четыре степени свободы, и её состояние определяется фазовыми координатами z0, b2, z1, z2. Аналогичная модель используется при исследовании поперечных колебаний кузова.
11.4.4. Построение имитационных моделей динамических систем
В динамической системе, как правило, протекают процессы различной физической природы: механические, гидравлические, электрические, тепловые и т. д. Основой для построения структурной схемы такой системы служат физические законы. Они связывают между собой физические величины внутри системы и внешние силы. Основные уравнения динамической системы будем составлять с использованием понятия "динамические звенья", изучаемого в ТАР.
На первоначальном этапе составления структурной схемы связи между динамическими звеньями удобнее представлять в виде сети. Подобно структурным схемам, сети связей физических величин или просто сети связей используются для наглядного изображения физических зависимостей динамических систем. Между структурной схемой и сетью связей физических величин имеется прямое соотношение: прямоугольник структурной схемы соответствует ветви, а линия передачи сигнала - узлу сети [15]. Сравним структурную схему (рис.4.3) и сеть связей физических величин (рис.4.4) одной и той же системы.
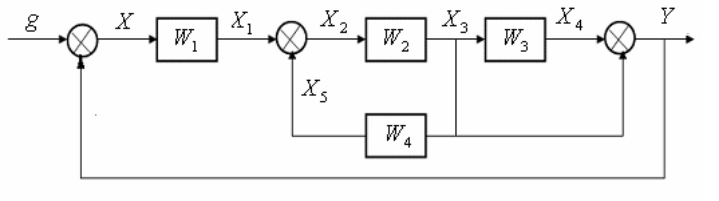
Рис.4.3. Структурная схема
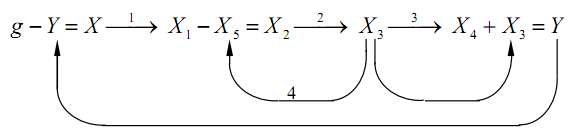
Рис. 4.4. Сеть связей физических величин
Правила составления сети связей физических величин:
1) номер ветви соответствует номеру передаточной функции динамического звена;
2) ветвь, соединяющая одноименные величины, не имеет номера (передаточная функция для такой ветви равна единице);
3) элементу сравнения на сети связей соответствует разность, а сумматору - сумма двух величин, равная третьей величине (результату);
4) результат вычитания или суммирования всегда записывают справа от знака равенства.
Используя принцип декомпозиции, можно любую сколь угодно сложную динамическую систему разделить на связанные между собой элементарные звенья. Рассмотрим некоторые элементарные звенья, их сети связей, физические зависимости между входными и выходными величинами, а также передаточные функции.
1) Редуктор (рис.4.5).
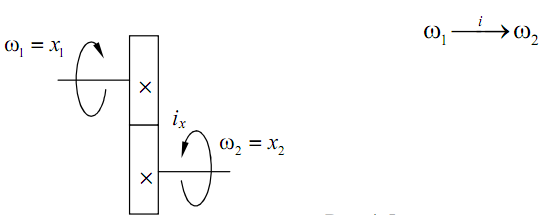
Рис.4.5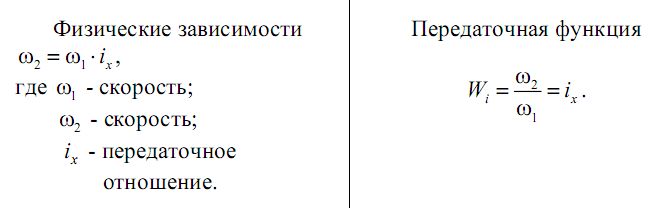 2)
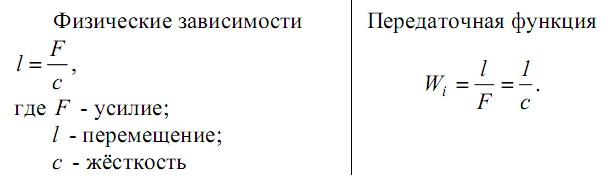
Пружина (рис.
4.6).
2)
Пружина (рис.
4.6).
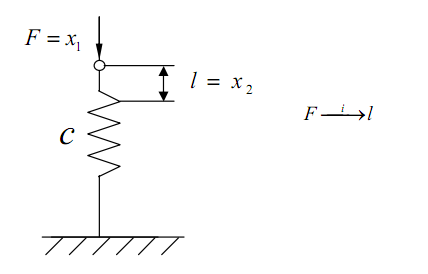
Рис. 4.6
 3)
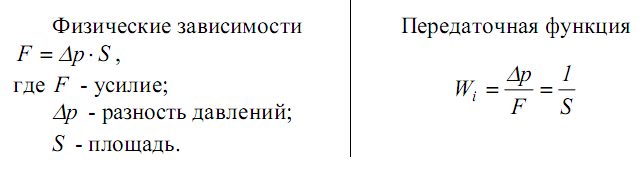
Цилиндр (рис.
4.7).
3)
Цилиндр (рис.
4.7).
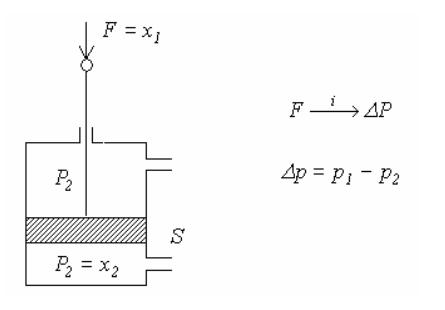
Рис. 4.7
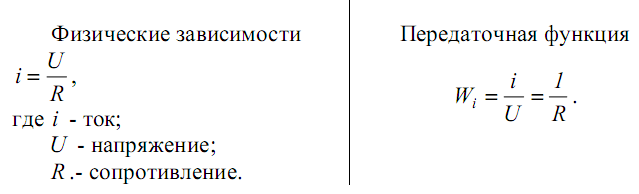
 4)
Электрическое
сопротивление (рис.4.8).
4)
Электрическое
сопротивление (рис.4.8).
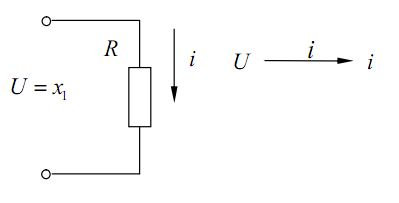
Рис. 4.8
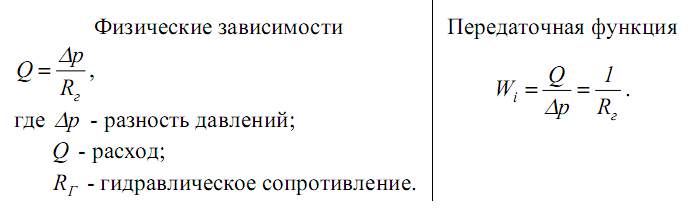
 5)
Гидравлический
дроссель (рис.4.9)
5)
Гидравлический
дроссель (рис.4.9)
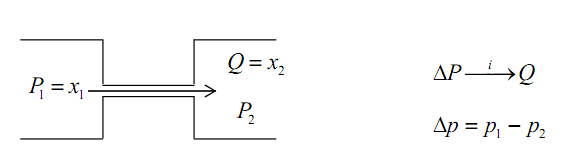
Рис.4.
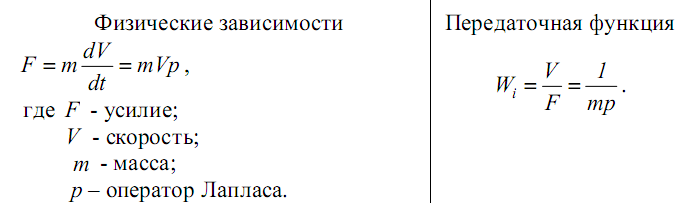
6) Движущаяся масса (рис.4.10).

Рис. 4.10
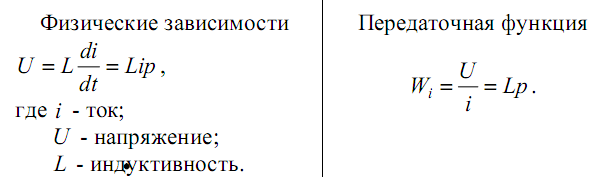
 7)
Индуктивность
(рис.4.11).
7)
Индуктивность
(рис.4.11).
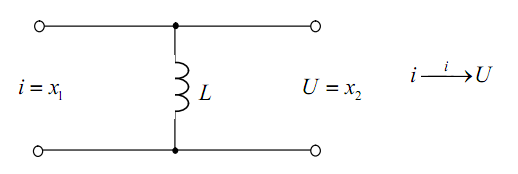
Рис. 4.11
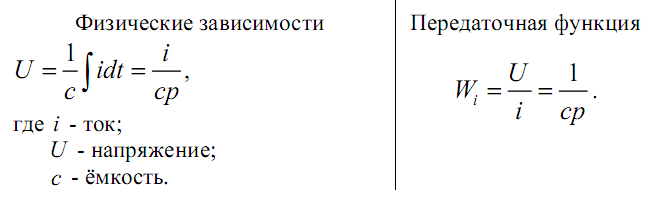
8) Ёмкость (рис.4.12).
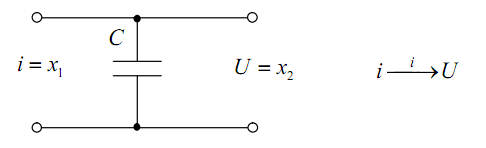
Рис. 4.12
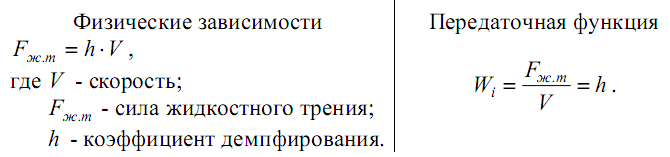
 9)
Жидкостное
трение (рис.4.13).
9)
Жидкостное
трение (рис.4.13).
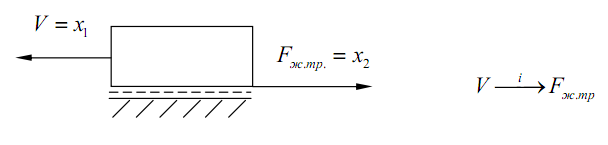
Рис. 4.13
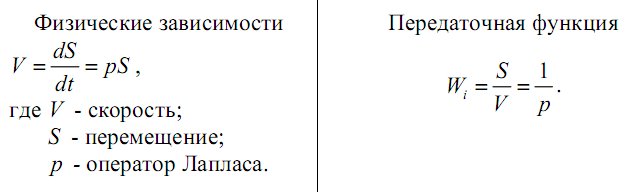
 10)
Преобразование
перемещения (рис.4.14).
10)
Преобразование
перемещения (рис.4.14).
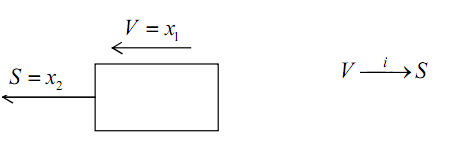
Рис.4.14
 Построив
сеть связей и записав зависимости
физических величин для каждого
элементарного звена,
нетрудно
определить структурную схему и,
если необходимо,
передаточные
функции динамической системы.
Построив
сеть связей и записав зависимости
физических величин для каждого
элементарного звена,
нетрудно
определить структурную схему и,
если необходимо,
передаточные
функции динамической системы.
Пример 4.1
Требуется построить структурную схему гидравлического демпфера (амортизатора) с учетом массы подвижных частей. За входную величину принята сила, а за выходную – перемещение поршня (Рис.4.15).
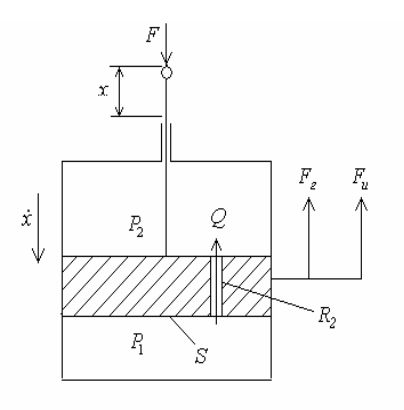
Рис. 4.15. Демпфер (амортизатор)
где F - внешняя сила; Fг - гидростатическая сила; Fи – инерционная сила; x - перемещение поршня; P1,P2 - давления в полостях цилиндра; Q - расход жидкости через дроссель; S - площадь поршня; Rг - гидравлическое сопротивление дросселя.
Здесь разность внешней силы F и внутренней гидростатической силы Fг определяет инерционную силу Fи. Эта разность сил зависит от разности давлений жидкости ΔP = P2 – P1 в нижней и в верхней полостях цилиндра.
В свою очередь,
инерционная
сила Fи
определяет ускорение поршня
![]() .
Проинтегрировав
ускорение
.
Проинтегрировав
ускорение
![]() ,
получим
скорость
,
получим
скорость
![]() ,
а проинтегрировав
скорость
,
а проинтегрировав
скорость
![]() ,
получим
перемещение x .
Скорость
,
получим
перемещение x .
Скорость
![]() определяет расход жидкости Q из нижней
полости в верхнюю полость,
что при
известном гидравлическом сопротивлении
дроссельного отверстия в поршне
позволяет найти разность давлений
жидкости ΔP в нижней и в верхней полостях
гидроцилиндра,
а следовательно,
и гидростатическую
силу Fг.
определяет расход жидкости Q из нижней
полости в верхнюю полость,
что при
известном гидравлическом сопротивлении
дроссельного отверстия в поршне
позволяет найти разность давлений
жидкости ΔP в нижней и в верхней полостях
гидроцилиндра,
а следовательно,
и гидростатическую
силу Fг.
Сеть связей физических величин показывает рассмотренные качественные зависимости физических величин (рис. 4.16).
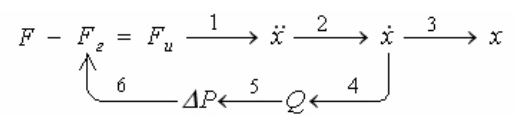
Рис.4.16. Качественные зависимости
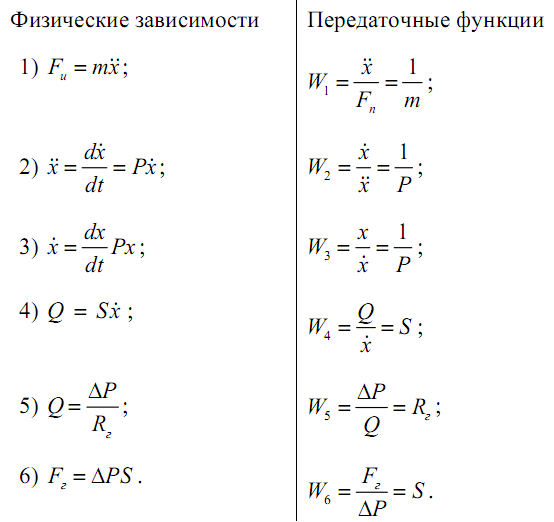
Физические уравнения и соответствующие им передаточные функции определяют количественные зависимости физических величин.
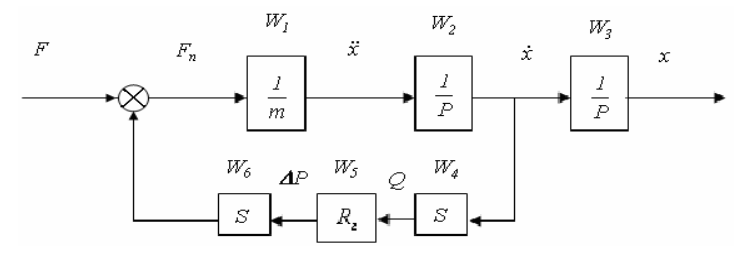
Рис. 4.17. Структурная схема амортизатора
Структурная схема (рис.4.17) представляет собой имитационную модель гидравлического амортизатора. Движение этой модели легко описать с помощью системы линейных ДУ и решить их с помощью ЭВМ.
Пример 4.2
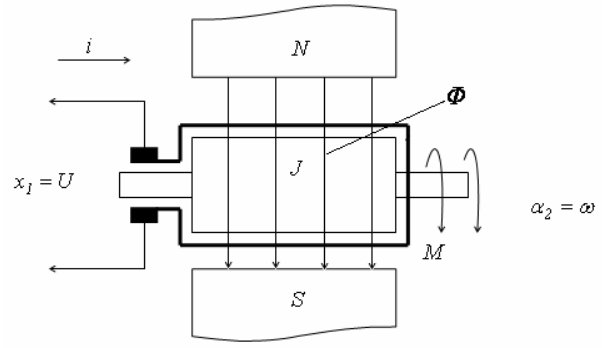
Двигатель постоянного тока (рис. 4.18).