ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 31.03.2024
Просмотров: 1054
Скачиваний: 0
СОДЕРЖАНИЕ
Математическое моделирование элементов сложных экологических систем
Лекция 1. Введение в моделирование. Исторический экскурс.
1. Основы моделирования в экологии 1.1. Общие принципы построения моделей в экологии
2.2. Этапы построения математической модели
1.4. Элементы теории подобия, применяемые в моделировании
3.2.2. Выборочный метод в экологометрике.
Зависимость числа интервалов от объема выборки
Статистический ряд по интервалам
Лекция 4. Статистические оценки параметров распределения случайных величин по выборкам
4.4. Статистические оценки гипотез об экологических моделях
Выборка из генеральной совокупности
Статистическая таблица эксперимента
Пример преобразования членов уравнения регрессии
Вычисление данных для линеаризации уравнения регрессии
Нормальные уравнения мнк для некоторых функций
Статистическое оценивание уравнения регрессии и парной корреляции.
Обработка результатов наблюдений
Рекомендации по выбору вида функции
3.4. Динамические статистические модели
Данные по объему сброса качественных сточных вод
Данные по объему сброса сточных вод за 5-летие
Пример расчета 5-летних средних
Расчетные значения для определения уравнения динамики
Ряд динамики для определения сезонных колебаний
Эксперименталъный материал исследования
8.1. Анализ влияния отдельных факторов в экологической модели.
Лекция 9. Методы оптимизации. Метод Лагранжа
Лекция 10. Метод линейного программирования.
Лекция 11. Функциональные модели.
Лекция 12. Модели процессов содержащие обыкновенные дифференциальные уравнения.
Численные ошибки использованных для вычисления данных
Лекция 13. Статистические модели динамики.
Лекция 16. Информационные технологии в экологии. Экологические информационные системы.
1 6.1. Экологические информационные системы
1. Какова область значения для числовых характеристик?
Лекция 17. Использование информационных технологий для решения задач экологии.
Критические значения коэффициента корреляции rk;α
2.1. Подобие физических явлений и его признаки
2.4. Применение методов подобия в математическом
11.3. Численные методы решения дифференциальных уравнений
11.3.2. Процесс численного решения
11.3.4. Модифицированный метод Эйлера
11.3.6. Метод Рунге – Кутта для систем дифференциальных уравнений
11.3.7. Общая характеристика одношаговых методов
11.3.9. Методы прогноза и коррекции
11.3.10. Краткая характеристика методов прогноза и коррекции.
11.3.11. Выбор шага и погрешность решения.
11.4. Имитационное моделирование систем
11.4.1. Принципы имитационного моделирования
11.4.3. Динамическая модель исследуемого объекта
11.4.4. Построение имитационных моделей динамических систем
11.4.5. Преобразование передаточных функций звеньев в дифференциальные уравнения в форме Коши
11.4.6. Синтез имитационной модели на основе структурной схемы
11.5. Теоретические основы построения математических моделей систем
11.5.1. Компонентные и топологические уравнения
11.5.2. Компонентные и топологические уравнения механической системы
11.5.3. Компонентные и топологические уравнения электрической системы
11.5.4. Компонентные и топологические уравнения гидравлической системы
11.5.5. Компонентные и топологические уравнения тепловой системы
11.6.1. Сущность метода электроаналогий.
11.6.2. Электромеханические аналогии
11.6.3. Построение имитационных моделей методом электроаналогий
11.6.4. Плоское прямолинейное движение звеньев
11.6.5. Электрогидравлические аналогии
схему замещения. Прямоугольники с обозначениями напряжений Ra и Rb рассматриваем теперь как две части электрического биполярного разъема (рис.6.16), причем направления стрелок внутри прямоугольников соответствуют полярности э.д.с. на контактах разъема.
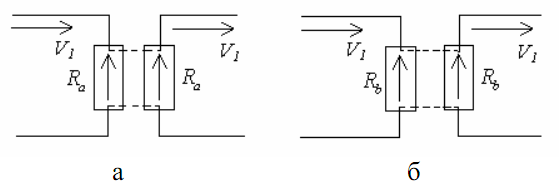
Рис.6.16. Соединения подсистем:
а – первой со второй; б – второй с третьей
Непосредственно из схем разъемных соединений следуют очевидные правила:
1. токи, протекающие через две одноименные части разъема равны между собой по модулю;
2. направления токов, протекающих через две одноименные части разъема, противоположны по отношению к э.д.с. на контактах разъема. Это означает, что если в правой части разъема ток «втекает в стрелку», то в левой части разъема он вытекает из «стрелки», и наоборот (рис.6.16).
Общая электрическая схема замещения (рис 6.17) содержит четыре контура и четыре трансформатора.
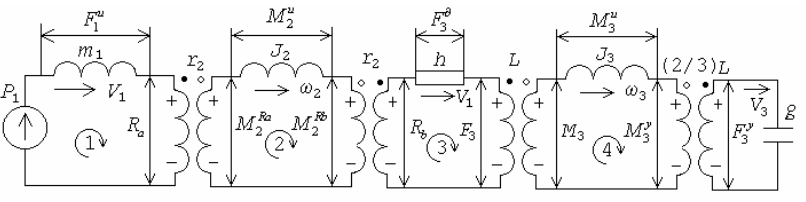
Рис. 6.17. Общая электрическая схема замещения
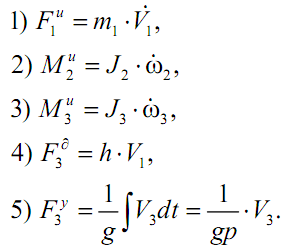
Уравнения Кирхгофа для контуров 1-4 совпадают с уравнениями сил и моментов (6.4–6.6). Записываем уравнения трансформаторов, куда включаем соотношения напряжений, токов и скоростей изменений токов.

Компонентные уравнения инерционных, диссипативных и упругих элементов:
Далее строим сеть связей физических величин (рис. 6.18). Эту работу следует выполнять, соблюдая следующие правила:
1. В уравнениях Кирхгофа для контуров можно выносить вправо от знака равенства только напряжения на индуктивностях и на активных сопротивлениях, а также напряжения, соответствующие неизвестным внутренним силам или моментам. Напряжения на емкостях выносить вправо от знака равенства нельзя.
2. Если инерционное звено соединено с другими звеньями упругими связями, то в уравнении Кирхгофа напряжение на индуктивности, эквивалентной рассматриваемому инерционному звену, всегда выносят вправо от знака равенства.
3. Если два или более инерционных звена соединены жесткой кинематической связью, то из этой группы звеньев надо выбрать одно ведущее звено. Соответственно в уравнениях Кирхгофа надо вынести вправо от знака равенства только то напряжение, которое эквивалентно инерционной силе на ведущем звене.
Напряжения на остальных инерционных звеньях рассматриваемой группы выносить вправо от знака равенства нельзя.
4. Чтобы определить напряжение на конденсаторе, надо знать протекающий через него ток.
5. Напряжение на активном сопротивлении можно определить с помощью тока, протекающего через это сопротивление, или из уравнения Кирхгофа для соответствующего контура.
6. Напряжение на индуктивности можно определить с помощью уравнения Кирхгофа для контура, содержащего эту индуктивность, или с помощью производной от тока через индуктивность.
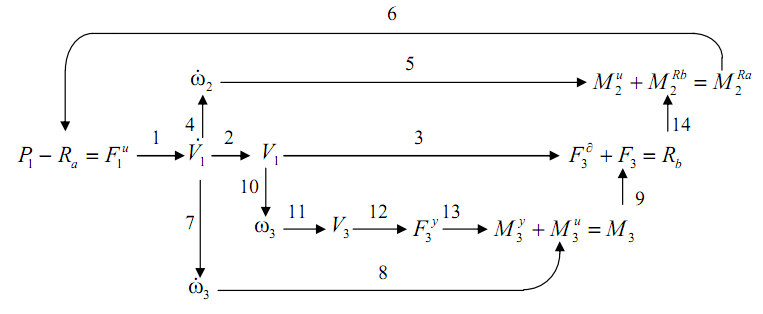
Рис. 6.18. Сеть связей
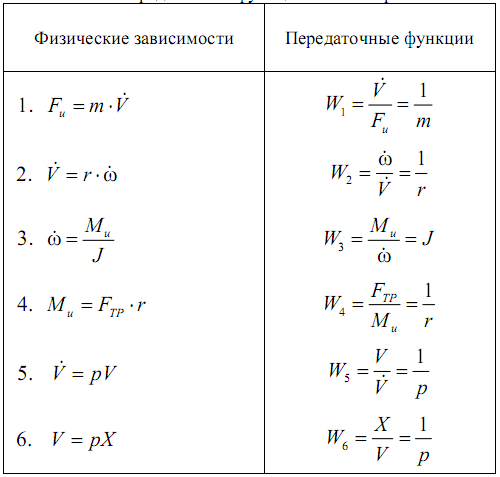
Таблица 6.5
Передаточные функции элементарных звеньев
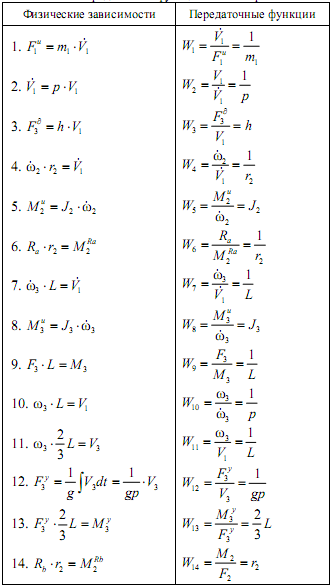
Чтобы перейти от сети связей к структурной схеме динамической системы, записываем передаточные функции элементарных звеньев (табл. 6.5) и заменяем в сети связей ветви на передаточные функции этих звеньев.
Общая структурная схема (рис.6.19) содержит два интегрирующих звена.
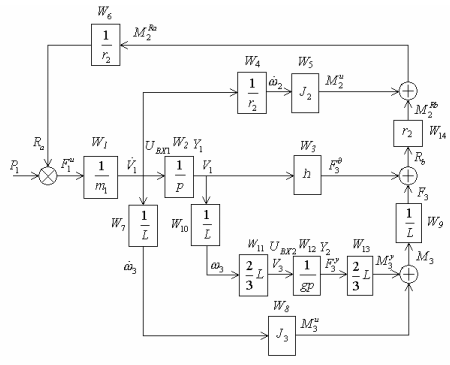
Рис. 6.19. Общая структурная схема
Дифференциальные уравнения этих звеньев имеют следующий вид:
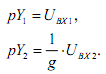
Записываем уравнение связи для первого интегрирующего звена.

Раскрывая скобки и решая данное уравнение относительно UBX1, получаем:
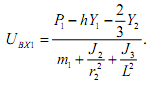
Уравнение связи для второго интегрирующего звена имеет следующий вид:
![]()
Подставляя выражения BX1 U и BX 2 U в дифференциальные уравнения интегрирующих звеньев и полагая
![]()
получаем общую систему дифференциальных уравнений математической модели в форме Коши:
11.6.4. Плоское прямолинейное движение звеньев
Пример 6.3
В качестве первого примера возьмём диск радиуса r, катящийся по плоской поверхности под действием внешней силы T, приложенной к центру диска (рис. 6.20).
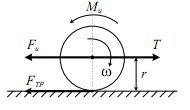
Рис. 6.20
Под действием силы T тело вращается по часовой стрелке со скоростью ω. Силами сопротивления здесь являются инерционная сила Fи и сила трения FТР. Составим уравнение равновесия указанных выше сил:
![]() (6.7)
(6.7)
и уравнение действующих на тело моментов:
![]() (6.8)
(6.8)
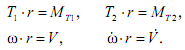
где
![]() .
.
Уравнения (6.7-6.8) служат основой для построения эквивалентной электрической схемы (рис. 6.21). Эта схема строится в два этапа. Вначале следует вычертить нижний контур, в котором напряжения и э.д.с. должны соответствовать уравнению равновесия сил (6.7). На втором этапе чертим верхний контур, отвечающий
уравнению равновесия моментов (6.8). Заметим, что в уравнении (6.8) момент трения MTP определяется в виде произведения силы трения FTP на радиус r . Чтобы выполнить операцию умножения, в электрическую схему введен трансформатор с коэффициентом трансформации r .
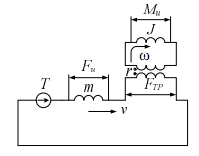
Рис. 6.21
Уравнения трансформатора включают соотношения для напряжений, токов и скоростей изменений токов:

Далее приступаем к построению сети связей физических величин. Для этого в уравнении (6.7) выносим вправо инерционную составляющую Fu (см. па-раф 6.2). Сеть связей состоит из шести ветвей (рис.6.22).
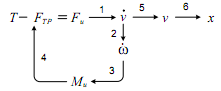
Рис.6.22
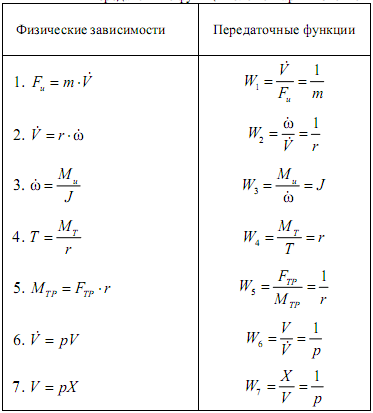
С помощью сети связей определяем передаточные функции элементарных звеньев (табл. 6.6).
Таблица 6.6
Передаточные функции элементарных звеньев
Дальнейший переход от сети связей к структурной схеме динамической системы осуществляется так же, как в предыдущем примере.
Пример 6.4
В качестве второго примера возьмём тот же диск радиуса r, катящийся по плоской поверхности под действием внешней силы T приложенной к верхней точке диска (рис.6.23). Под действием силы T, тело вращается по часовой стрелке со скоростью ω. Силами сопротивления здесь являются инерционная сила Fu и сила трения FТР. Составим уравнение равновесия указанных выше сил.
![]() (6.9)
(6.9)
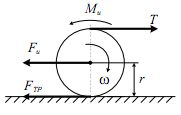
Рис. 6.23
Составим уравнение равновесия действующих на тело моментов. Моменты определяем относительно центра масс тела.
![]() (6.10)
(6.10)
где
![]() ,
,![]() .
.
Уравнения (6.9) и (6.10) служат основой для построения эквивалентной электрической схемы (рис. 6.24). Переменные MTP и MT, входящие в уравнение (6.10), определяются произведениями соответствующих сил FTP и T на радиус r. Чтобы выполнить указанные операции умножения, в электрической схеме применены два трансформатора с коэффициентом передачи r.
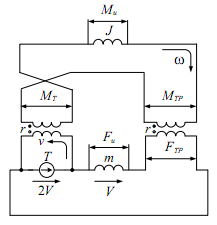
Рис. 6.24
Записываем уравнения трансформаторов:
![]()
Чтобы построить сеть связей, воспользуемся уравнением (6.9).

Рис.6.25
В этом уравнении вынесем вправо инерционную составляющую Fu и полученную зависимость поместим в сеть связей (рис.6.25). Сеть связей состоит из 7 ветвей.
Каждой ветви построенной сети связей отвечает элементарное звено. Сводим передаточные функции элементарных звеньев в общую таблицу (табл.6.7). Дальнейший переход от сети связей к структурной схеме динамической системы осуществляется так же, как в примере 1.
Пример 6.5
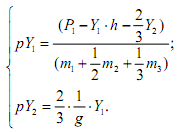
В качестве следующего примера возьмём диск, подвешенный на нити, один конец которой закреплён на неподвижном основании, а к другому концу приложено некоторое внешнее воздействие Т1, причём Т1 > P/2 > Т2 (рис. 6.26). Диск имеет радиус r. Внешняя сила T1 создаёт вращающий момент МТ1, под действием которого диск вращается по часовой стрелке с угловой скоростью ω. Инерционный момент Mи и момент МТ2, создаваемый силой натяжения нити T2, препятствуют вращению
диска и, следовательно, являются силами сопротивления.
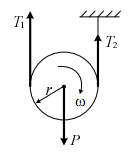
Рис. 6.26
Таблица 6.7
Передаточные функции элементарных звеньев
Составим уравнение равновесия сил
![]() (6.11)
(6.11)
и уравнение равновесия моментов
![]() (6.12)
(6.12)
где
![]() ,
,![]()
Уравнения (6.11) и (6.12) служат основой для построения эквивалентной электрической схемы (рис.6.27).
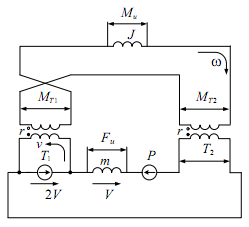
Рис. 6.27
Уравнения трансформаторов:
В качестве основы для построения сети связей (рис.6.28) использовано уравнение (6.11). Передаточные функции в табл. 6.8.
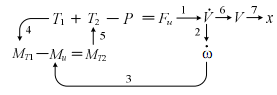
Рис. 6.28
Таблица 6.8
Передаточные функции элементарных звеньев

Пример 6.6
В качестве следующего примера рассмотрим механическое устройство, которое представляет собой жёсткий вал на 3 опорах, обладающих свойствами упругости и демпфирования (рис.6.29). Такое устройство может служить прототипом шпинделя металлорежущего станка, установленного на 3 подшипниках.
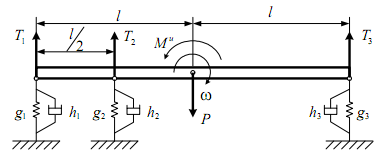
Рис. 6.29
В рассматриваемом примере вал длинной 2l под действием внешней силы P и сил реакций Т1, Т2, Т3 в опорах совершает сложные колебания, которые можно представить как сумму поступательных движений вала параллельно самому себе и вращательных движений вала, совершаемых вокруг его центра масс. Внутренние силы Т1, Т2, Т3 в опорах зависят от значений коэффициентов податливости g1, g2, g3 и коэффициентов демпфирования h1, h2, h3 опор.