ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 31.03.2024
Просмотров: 1166
Скачиваний: 0
СОДЕРЖАНИЕ
Математическое моделирование элементов сложных экологических систем
Лекция 1. Введение в моделирование. Исторический экскурс.
1. Основы моделирования в экологии 1.1. Общие принципы построения моделей в экологии
2.2. Этапы построения математической модели
1.4. Элементы теории подобия, применяемые в моделировании
3.2.2. Выборочный метод в экологометрике.
Зависимость числа интервалов от объема выборки
Статистический ряд по интервалам
Лекция 4. Статистические оценки параметров распределения случайных величин по выборкам
4.4. Статистические оценки гипотез об экологических моделях
Выборка из генеральной совокупности
Статистическая таблица эксперимента
Пример преобразования членов уравнения регрессии
Вычисление данных для линеаризации уравнения регрессии
Нормальные уравнения мнк для некоторых функций
Статистическое оценивание уравнения регрессии и парной корреляции.
Обработка результатов наблюдений
Рекомендации по выбору вида функции
3.4. Динамические статистические модели
Данные по объему сброса качественных сточных вод
Данные по объему сброса сточных вод за 5-летие
Пример расчета 5-летних средних
Расчетные значения для определения уравнения динамики
Ряд динамики для определения сезонных колебаний
Эксперименталъный материал исследования
8.1. Анализ влияния отдельных факторов в экологической модели.
Лекция 9. Методы оптимизации. Метод Лагранжа
Лекция 10. Метод линейного программирования.
Лекция 11. Функциональные модели.
Лекция 12. Модели процессов содержащие обыкновенные дифференциальные уравнения.
Численные ошибки использованных для вычисления данных
Лекция 13. Статистические модели динамики.
Лекция 16. Информационные технологии в экологии. Экологические информационные системы.
1 6.1. Экологические информационные системы
1. Какова область значения для числовых характеристик?
Лекция 17. Использование информационных технологий для решения задач экологии.
Критические значения коэффициента корреляции rk;α
2.1. Подобие физических явлений и его признаки
2.4. Применение методов подобия в математическом
11.3. Численные методы решения дифференциальных уравнений
11.3.2. Процесс численного решения
11.3.4. Модифицированный метод Эйлера
11.3.6. Метод Рунге – Кутта для систем дифференциальных уравнений
11.3.7. Общая характеристика одношаговых методов
11.3.9. Методы прогноза и коррекции
11.3.10. Краткая характеристика методов прогноза и коррекции.
11.3.11. Выбор шага и погрешность решения.
11.4. Имитационное моделирование систем
11.4.1. Принципы имитационного моделирования
11.4.3. Динамическая модель исследуемого объекта
11.4.4. Построение имитационных моделей динамических систем
11.4.5. Преобразование передаточных функций звеньев в дифференциальные уравнения в форме Коши
11.4.6. Синтез имитационной модели на основе структурной схемы
11.5. Теоретические основы построения математических моделей систем
11.5.1. Компонентные и топологические уравнения
11.5.2. Компонентные и топологические уравнения механической системы
11.5.3. Компонентные и топологические уравнения электрической системы
11.5.4. Компонентные и топологические уравнения гидравлической системы
11.5.5. Компонентные и топологические уравнения тепловой системы
11.6.1. Сущность метода электроаналогий.
11.6.2. Электромеханические аналогии
11.6.3. Построение имитационных моделей методом электроаналогий
11.6.4. Плоское прямолинейное движение звеньев
11.6.5. Электрогидравлические аналогии
Параметрами упругих и диссипативных элементов являются соответственно теплоемкость CT и коэффициент теплового сопротивления µT. Потенциальная переменная Ту характеризует температуру дискретного элемента, а Тд - представляет собой разность температур смежных дискретных элементов.
Топологические уравнения имеют вид:
Первое уравнение выражает условие равновесия потенциалов на поверхностях контакта дискретных элементов. А второе – условие непрерывности функции температуры.
назад
11.6. Метод электроаналогий
11.6.1. Сущность метода электроаналогий.
С появлением электротехники в ней стали широко применяться электрические схемы в качестве наглядных образов исследуемых объектов. Электрические схемы глубоко изучены. В отличие от механической энергии электрическая энергия передается в электрических цепях посредством ветвей, содержащих резисторы,
конденсаторы, катушки индуктивности и др., а перераспределяется электрическая энергия между ветвями посредством узлов. Поэтому электрические процессы можно исследовать с помощью известных понятий: электрического тока, напряжения, э.д.с. Математическое описание электрических процессов часто совпадает с описанием процессов в объектах иной физической природы, что позволяет исследования явлений в неэлектрических системах заменить исследованиями аналогичных явлений в электрических цепях [5].
Современные сложные машины и механизмы представляют собой совокупность взаимодействующих механических, гидравлических, пневматических, электрических и других компонентов. Их динамические характеристики описываются
уравнениями, которые связаны с механическими и электромагнитными явлениями, свойствами движущихся жидкостей и газов, распространением магнитных и тепловых потоков и т.д.
Сравнивая компонентные уравнения различных видов систем, легко обнаружить их динамические аналогии (табл. 6.1). Топологические уравнения этих систем также абсолютно аналогичны. В этом проявляется единство физических законов,
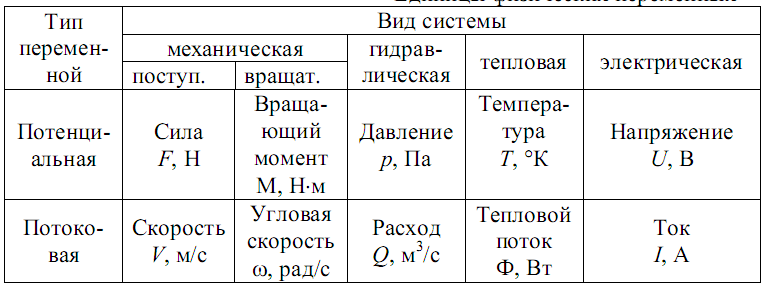
применимых к разнообразным формам существования материи. Аналогия систем различной физической природы также видна, если сравнить единицы измерений потенциальных и потоковых переменных (табл. 6.2).
Метод электроаналогий не сводится к простой замене законов механики законами электротехники. Такая замена в общем случае невозможна. Например, чтобы построить электромеханическую модель движения твердого тела вокруг неподвижной точки, необходимо рассматривать векторную функцию изменения момента
количества движения и тензор инерции, определяющие динамику твердого тела. Законы электрических цепей выражаются скалярными функциями и не могут полностью заменить законы теоретической механики.
Таблица 6.1
Компонентные уравнения
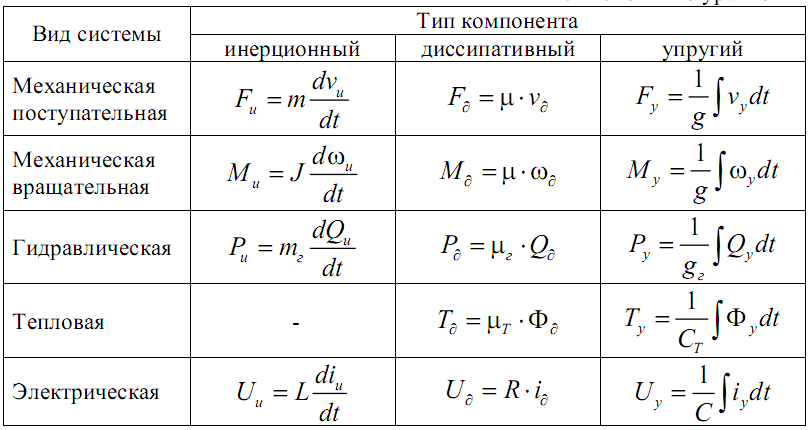
Таблица 6.2
Единицы физических переменных
Концепция метода электроаналогий основана на том, что этот метод добавляет к законам теоретической механики законы электротехники. Это позволяет расширить представление о происходящих явлениях и формализовать синтез математических моделей сложных механических систем. Отметим основные аспекты
данной концепции.
Первый аспект – возможность применения для решения задач законов Кирхгофа из электротехники. Они дают электрическим моделям значительное преимущество перед моделями иной физической природы, так как в других областях техники нет законов, полностью адекватных законам Кирхгофа. Это замечание, прежде всего, относится к механическим объектам, которые обычно представляют в виде структурно-кинематических схем. Кинематическая схема характеризует одновременно геометрию механизма и его движение, что затрудняет топологическое представление механических систем.
Наиболее сложно в механике применить аналог первого закона Кирхгофа, в соответствии с которым сумма токов в узле электрической схемы равна нулю. Продифференцировав уравнение токов в узле, получим важное следствие, вытекающее из первого закона Кирхгофа: сумма производных токов (применительно к
механике – ускорений) в узле также равна нулю. Данное утверждение в терминах механики не столь очевидно, как в электротехнике.
Второй аспект – применение в эквивалентных электрических схемах замещения идеальных трансформаторов, как с постоянными, так и с переменными коэффициентами трансформации.
Трансформатор с переменным коэффициентом трансформации (случаи плоских криволинейных и пространственных движений тел) представляет собой амплитудный модулятор напряжений, токов и производных токов. Математическое описание таких объектов уравнениями механики затруднительно.
Третьим аспектом концепции метода электроаналогий являются электрические разъемные соединения, с помощью которых эквивалентные электрические схемы замещения можно собирать из отдельных независимых модулей (подсистем), что позволяет конструировать математические модели по агрегатному (расширяемому) принципу.
Основной подход математического моделирования с использованием электромеханических аналогий сводится к следующей последовательности действий:
1) разделить механическую систему на отдельные подсистемы, каждая из которых включает одну сосредоточенную массу;
2) применяя принцип Даламбера, составить уравнения кинетостатики, определяющие движение тела с выделенной массой;
3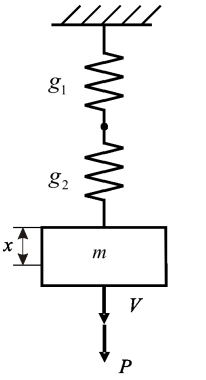 )спроектировать
векторные уравнения кинетостатики на
координатные оси и заменить векторные
соотношения скалярными;
)спроектировать
векторные уравнения кинетостатики на
координатные оси и заменить векторные
соотношения скалярными;
4) используя таблицу электроаналогий (табл.6.1), выделить в механической системе инерционные, диссипативные и упругие элементы;
5) построить на основе полученных уравнений эквивалентную электрическую схему замещения;
6) на основе электрической схемы записать уравнения по первому закону Кирхгофа и уравнения трансформаторов. Продифференцировать эти уравнения и добавить к уравнениям теоретической
Рис. 6.1 Груз на двух механики.
пружинах.
Уравнения по второму закону Кирхгофа записывать не нужно, так как они совпадают с уравнениями кинетостатики для сил и моментов. Рассмотрим общий подход к синтезу имитационных моделей методом электроаналогий на простейших примерах.
Пример 6.1
Составить математическую модель груза массой m, подвешенного на двух пружинах с податливостями g1=1/c1 и g2=1/c2, где c1 и c2 - жесткости пружин (см. рис. 6.1). В соответствии с таблицей электроаналогий (Таб. 6.1 и 6.2), строим электрическую схему, эквивалентную данному механическому устройству.
Индуктивности, емкости, э.д.с., напряжения и токи в электрических схемах будем обозначать с помощью соответствующих символов, принятых в механике.
В данном механизме скорости деформаций пружин V1 и V2 складываются. Усилие на обеих пружинах Fy одинаковое. Этому условию соответствует параллельное включение конденсаторов в электрической схеме (рис. 6.2).
Уравнения Кирхгофа для этой схемы:
P - Fи - Fу = 0, (6.1)
V -V1-V2 = 0. (6.2)
На основании уравнений Кирхгофа строим сеть связей (рис. 6.3).
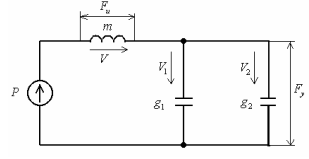
Рис. 6.2. Электрическая схема
В уравнении (6.1)
выносим вправо
от знака равенства инерционную
составляющую Fu.
От нее с помощью
соотношения
![]() переходим
к скорости изменения тока
переходим
к скорости изменения тока![]() .
Интегрируя
скорость изменения тока
.
Интегрируя
скорость изменения тока
![]() ,
определяем
ток V
, а
интегрируя ток V
, получаем
суммарный заряд на конденсаторах x
. Заметим,
что соотношение
токов и напряжений для индуктивности
аналогично 2-му
закону Ньютона.
Скорость
изменения тока является аналогом
ускорения,
ток –
аналогом
скорости, а
суммарный заряд на конденсаторах -
аналогом
суммарного перемещения груза.
,
определяем
ток V
, а
интегрируя ток V
, получаем
суммарный заряд на конденсаторах x
. Заметим,
что соотношение
токов и напряжений для индуктивности
аналогично 2-му
закону Ньютона.
Скорость
изменения тока является аналогом
ускорения,
ток –
аналогом
скорости, а
суммарный заряд на конденсаторах -
аналогом
суммарного перемещения груза.
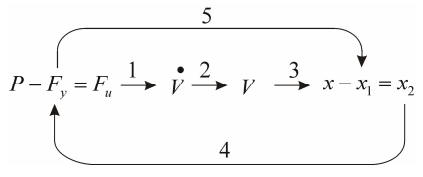
Рис. 6.3
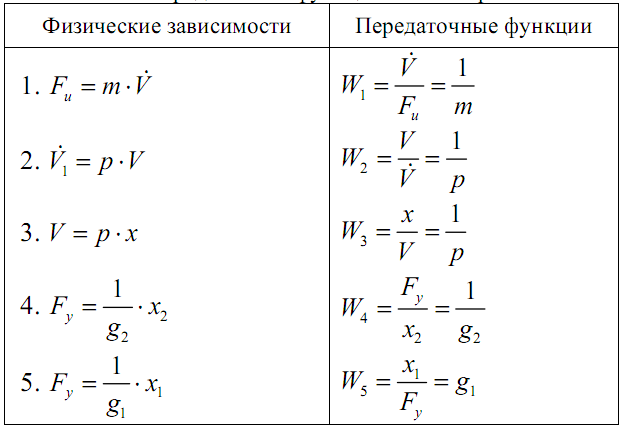
Таблица 6.3
Передаточные функции элементарных звеньев
Проинтегрируем уравнение (6.2). В результате получаем уравнение
x - x1 - x2 = 0.
Это соотношение баланса зарядов на конденсаторах g1 и g2, которое позволяет завершить построение сети связей для рассматриваемого устройства. Каждой ветви сети связей соответствует элементарное звено со своей передаточной функцией (табл. 6.3). Используя выражения передаточных функций для элементарных звеньев, переходим от сети связей к структурной схеме динамической модели (рис. 6.4).
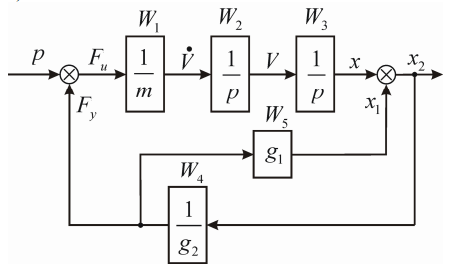
Рис. 6.4
Пример 6.2
Построить эквивалентную электрическую схему механического устройства (рис. 6.5).
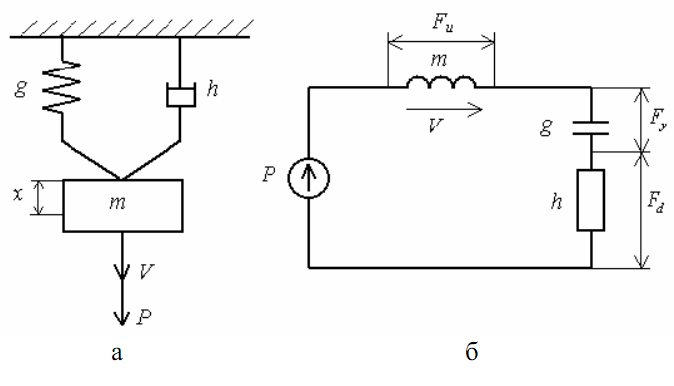
Рис. 6.5. Механическое устройство и его эквивалентная схема
В данном устройстве скорости деформаций пружины и демпфера одинаковы и равны скорости движения груза. В электрической схеме этому условию соответствует последовательное соединение индуктивности, ёмкости и сопротивления.
Записываем уравнение по второму закону Кирхгофа:
P - Fu - Fy - Fd = 0 . (6.3)
Построим сеть
связей. Для
этого в уравнении (6.3)
выносим вправо
от знака равенства инерционную
составляющую Fu,
с помощью
уравнения
![]() определяем скорость изменения тока
(ускорение)
определяем скорость изменения тока
(ускорение)
![]() ,
дважды
интегрируем эту переменную и вводим в
систему обратные связи по диссипативной
составляющей Fd
и по упругой
составляющей Fy
(рис.
6.6).
,
дважды
интегрируем эту переменную и вводим в
систему обратные связи по диссипативной
составляющей Fd
и по упругой
составляющей Fy
(рис.
6.6).
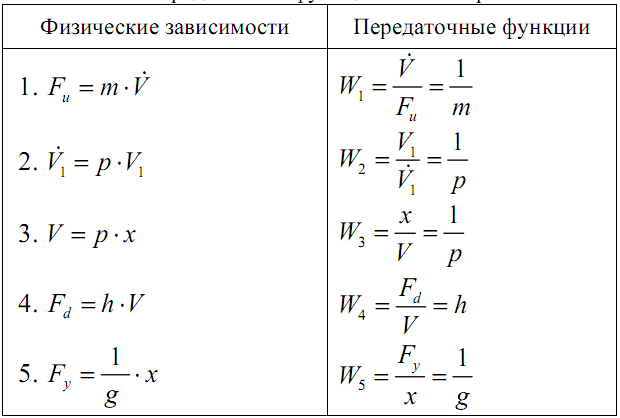
Каждую ветвь сети связей представляем в виде передаточной функции элементарного звена (табл. 6.4).

Рис. 6.6
Таблица 6.4
Передаточные функции элементарных звеньев
Заменяем в сети связей ветви на элементарные звенья и переходим к структурной схеме динамической системы (рис. 6.7).