ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 31.03.2024
Просмотров: 1137
Скачиваний: 0
СОДЕРЖАНИЕ
Математическое моделирование элементов сложных экологических систем
Лекция 1. Введение в моделирование. Исторический экскурс.
1. Основы моделирования в экологии 1.1. Общие принципы построения моделей в экологии
2.2. Этапы построения математической модели
1.4. Элементы теории подобия, применяемые в моделировании
3.2.2. Выборочный метод в экологометрике.
Зависимость числа интервалов от объема выборки
Статистический ряд по интервалам
Лекция 4. Статистические оценки параметров распределения случайных величин по выборкам
4.4. Статистические оценки гипотез об экологических моделях
Выборка из генеральной совокупности
Статистическая таблица эксперимента
Пример преобразования членов уравнения регрессии
Вычисление данных для линеаризации уравнения регрессии
Нормальные уравнения мнк для некоторых функций
Статистическое оценивание уравнения регрессии и парной корреляции.
Обработка результатов наблюдений
Рекомендации по выбору вида функции
3.4. Динамические статистические модели
Данные по объему сброса качественных сточных вод
Данные по объему сброса сточных вод за 5-летие
Пример расчета 5-летних средних
Расчетные значения для определения уравнения динамики
Ряд динамики для определения сезонных колебаний
Эксперименталъный материал исследования
8.1. Анализ влияния отдельных факторов в экологической модели.
Лекция 9. Методы оптимизации. Метод Лагранжа
Лекция 10. Метод линейного программирования.
Лекция 11. Функциональные модели.
Лекция 12. Модели процессов содержащие обыкновенные дифференциальные уравнения.
Численные ошибки использованных для вычисления данных
Лекция 13. Статистические модели динамики.
Лекция 16. Информационные технологии в экологии. Экологические информационные системы.
1 6.1. Экологические информационные системы
1. Какова область значения для числовых характеристик?
Лекция 17. Использование информационных технологий для решения задач экологии.
Критические значения коэффициента корреляции rk;α
2.1. Подобие физических явлений и его признаки
2.4. Применение методов подобия в математическом
11.3. Численные методы решения дифференциальных уравнений
11.3.2. Процесс численного решения
11.3.4. Модифицированный метод Эйлера
11.3.6. Метод Рунге – Кутта для систем дифференциальных уравнений
11.3.7. Общая характеристика одношаговых методов
11.3.9. Методы прогноза и коррекции
11.3.10. Краткая характеристика методов прогноза и коррекции.
11.3.11. Выбор шага и погрешность решения.
11.4. Имитационное моделирование систем
11.4.1. Принципы имитационного моделирования
11.4.3. Динамическая модель исследуемого объекта
11.4.4. Построение имитационных моделей динамических систем
11.4.5. Преобразование передаточных функций звеньев в дифференциальные уравнения в форме Коши
11.4.6. Синтез имитационной модели на основе структурной схемы
11.5. Теоретические основы построения математических моделей систем
11.5.1. Компонентные и топологические уравнения
11.5.2. Компонентные и топологические уравнения механической системы
11.5.3. Компонентные и топологические уравнения электрической системы
11.5.4. Компонентные и топологические уравнения гидравлической системы
11.5.5. Компонентные и топологические уравнения тепловой системы
11.6.1. Сущность метода электроаналогий.
11.6.2. Электромеханические аналогии
11.6.3. Построение имитационных моделей методом электроаналогий
11.6.4. Плоское прямолинейное движение звеньев
11.6.5. Электрогидравлические аналогии
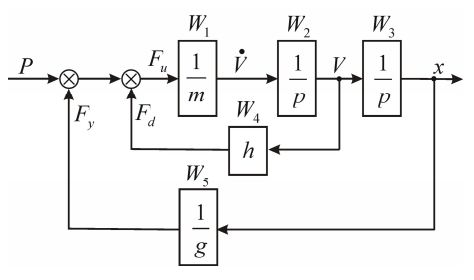
Рис. 6.7
11.6.2. Электромеханические аналогии
В теоретической механике все силы разделяются на внутренние силы и на внешние силы. Внутренними называются силы взаимодействия между материальными точками, входящими в состав рассматриваемой системы. В соответствии с законом равенства действия и противодействия, внутренние силы существуют попарно. При этом главный вектор и главный момент внутренних сил системы равен
нулю. Внешними называются силы, приложенные к материальным точкам рассматриваемой системы со стороны точек и тел, не входящих в состав этой системы. Внешние силы могут переходить в разряд сил внутренних, и наоборот, внутренние силы могут переходить в разряд внешних при изменении состава системы.
Рассмотрим систему, состоящую из двух соприкасающихся шаров (рис. 6.8).
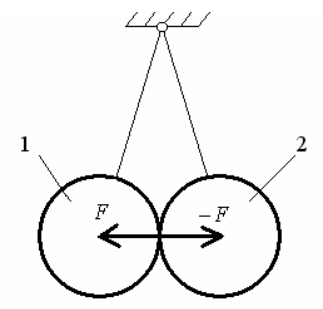
Рис. 6.8. Система из двух шаров
Векторы внутренних сил F для первого и второго шаров равны по модулю, но направлены противоположно. Поэтому сумма внутренних сил системы равна нулю.
Теперь разделим систему из двух шаров на две подсистемы, состоящие из одного шара (рис. 6.9). Силы давления второго шара на первый и первого шара на второй стали внешними (движущими) силами. Рассмотренный принцип разделения системы на более мелкие подсистемы называется декомпозицией системы.
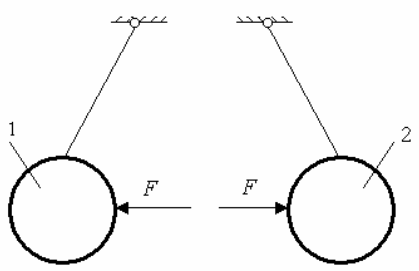
Рис.6.9. Две подсистемы, состоящие из одного шара
Материальные точки могут взаимодействовать между собой через передающие устройства. В механизмах широко распространены различные передающие
устройства: зубчатые колёса, рычаги и т. п. Если не учитывать силы трения и силы инерции в таких устройствах, то в эквивалентных электрических схемах их можно заменить идеальными трансформаторами. Рассмотрим уравнения, описывающие работу рычага и трансформатора.
а) Рычаг (рис.6.10).
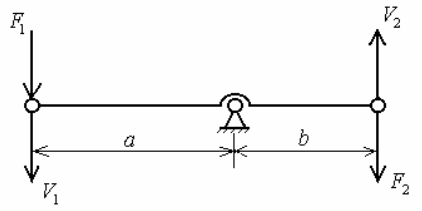
Рис. 6.10
Соотношения сил и скоростей определяются коэффициентом передачи рычага k :
F2 = k × F1 , V1 = k ×V2 ,
где k = a/b .
б) Идеальный трансформатор (рис. 6.11).
Полагаем, что потери мощности в идеальном трансформаторе отсутствуют, а индуктивность для потоков рассеяния равна нулю.
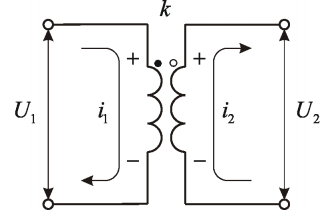
Рис. 6.11
Соотношения напряжений и токов в таком трансформаторе определяются коэффициентом трансформации k :
U2 = k ×U1, i1= k × i2,
где k = ω2/ ω1.
11.6.3. Построение имитационных моделей методом электроаналогий
Рассмотрим методику построения математических моделей методом электроаналогий на примере механизма с одной степенью свободы (рис. 6.12) [16], [17].
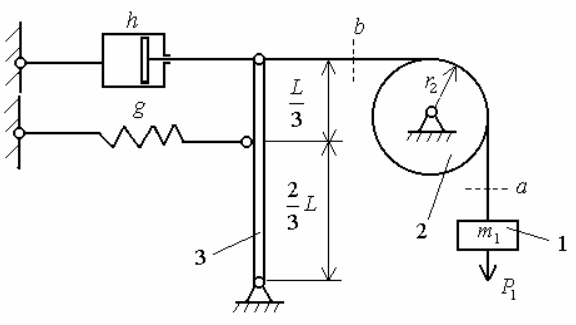
Рис. 6.12. Механизм с одной степенью свободы
Разделим систему на отдельные подсистемы, придерживаясь следующих правил:
1) Систему разделяют на подсистемы так, чтобы каждая подсистема содержала одну сосредоточенную массу. Количество подсистем должно быть равно числу
сосредоточенных масс механического устройства.
2) Векторы внутренних сил в каждой паре взаимодействующих подсистем обозначают одинаковыми символами, но направляют векторы этих сил на кинематических схемах взаимодействующих подсистем противоположно.
3) За положительное направление сил, скоростей и ускорений принимается направление движения сосредоточенной массы в первоначальный момент времени t=0. Скорости движений могут быть линейными или угловыми. Сочетания линейных и угловых скоростей (плоские движения твердых тел) раскладываются отдельно на линейные скорости и на угловые скорости.
4) Для обозначения сил и моментов, действующих в системе, рекомендуется использовать следующие символы:
a) точки разрыва внутренних связей в системе обозначают буквами a, b, c, … и т.д;
б) внутренние силы в точках разрыва связей обозначают большими буквами с соответствующими нижними индексами. Например, Ra, Rb, ..., Rc и т.д.;
в) моменты от сил, действующих на звено, обозначают большими буквами с верхним и нижним индексами.
Например,
![]() ,
,
![]() или
или![]() ,
,
![]() ,
где верхний
индекс означает силу,
а нижний –
номер звена,
к которому
приложена эта сила.
,
где верхний
индекс означает силу,
а нижний –
номер звена,
к которому
приложена эта сила.
В результате для рассматриваемого примера получаем три подсистемы.
Подсистема 1 (рис.6.13, а)
Включает подвешенное
на нити тело массой m1.
На него
действует внешняя сила –
сила веса P1,
под действием
которого тело движется вниз со скоростью
V1.
Силами
сопротивления здесь являются инерционная
сила
![]() и сила натяжения нити Ra
(внутренняя
сила).
и сила натяжения нити Ra
(внутренняя
сила).
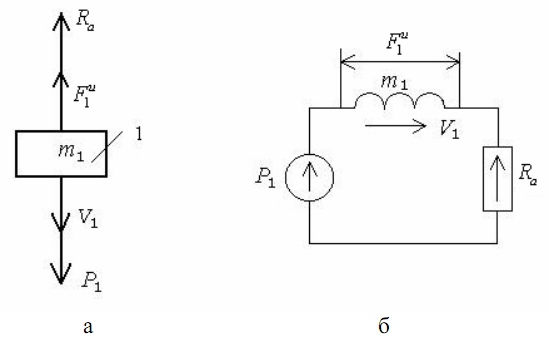
Рис. 6.13. Подсистема 1:
а – кинематическая схема, б – электрическая схема
Составим уравнение равновесия указанных выше сил:
![]() (6.4)
(6.4)
Оно служит основой для построения эквивалентной электрической схемы (рис.6.13, б). Эквивалентные электрические схемы конструируют по следующим правилам:
1) внешние движущие силы представляют на электрической схеме в виде источников э. д. с.;
2) внутренним силам (силам сопротивления), действующим на отдельную сосредоточенную массу, отвечают напряжения между определенными точками электрической схемы. Чтобы показать полярность каждого из этих напряжений, к
соответствующим двум точкам электрической схемы присоединяют прямоугольник, внутри которого изображают стрелку, обращенную к точке с положительным потенциалом;
3) скорость движения сосредоточенной массы эквивалентна току в цепи с индуктивностью;
4) скорость деформации упругого элемента эквивалентна току в цепи с емкостью;
5) скорость движения демпфирующего элемента эквивалентна току в цепи с активным сопротивлением;
6) индуктивности, конденсаторы, сопротивления, э. д. с., напряжения и токи на электрической схеме обозначают с помощью соответствующих символов, принятых в механике.
Подсистема 2 (рис. 6.14, а)
Состоит из колеса
с моментом инерции J2.
Сила натяжения
вертикальной части нити Ra
создает
на колесе 2
вращающий
момент
![]() и приводит его в движение с угловой
скоростью ω2.
По отношению
к звену 2 это
движущая сила.
Инерционный
момент
и приводит его в движение с угловой
скоростью ω2.
По отношению
к звену 2 это
движущая сила.
Инерционный
момент
![]() и сила натяжения горизонтальной части
нити Rb
препятствуют
вращению колеса и,
следовательно,
являются
силами сопротивления.
и сила натяжения горизонтальной части
нити Rb
препятствуют
вращению колеса и,
следовательно,
являются
силами сопротивления.
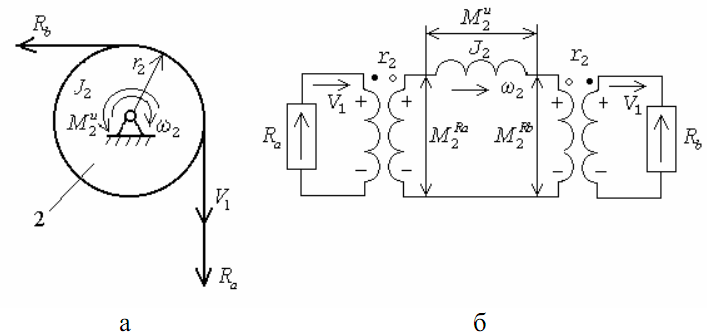
Рис.6.14. Подсистема 2:
а – кинематическая схема, б – электрическая схема
Запишем уравнение равновесия моментов, действующих на звено 2:
![]() (6.5)
(6.5)
где
![]() ,
,
![]() .
.
Этим уравнениям отвечает эквивалентная электрическая схема на рис. 6.14, б. Чтобы выполнить содержащиеся в последних выражениях операции умножения, в электрической схеме применены два трансформатора. Трансформаторы на электрических схемах изображают по следующим правилам:
1) возле изображения трансформатора должны быть указаны полярности напряжений на первичной и на вторичной обмотках и направления токов через эти обмотки в начальный момент времени t = 0;
2) начало первичной обмотки каждого трансформатора отмечают на электрической схеме черной точкой, а начало вторичной обмотки – прозрачной точкой. Токи в этих обмотках должны быть направлены в противоположные стороны. Так, например, если ток в первичной обмотке «втекает в точку», то во вторичной обмотке ток должен «вытекать из точки»;
3) для всех трансформаторов указывают коэффициенты передач. Они могут быть постоянными и переменными, безразмерными или иметь размерности физических величин.
Подсистема 3 (рис. 6.15, а)
Включает в себя рычаг 3, который под влиянием движущей силы F2 совершает вращательное движение ω3. Силами сопротивления движению являются инерционный момент Mи3, усилие демпфера Fd и усилие пружины Fy.
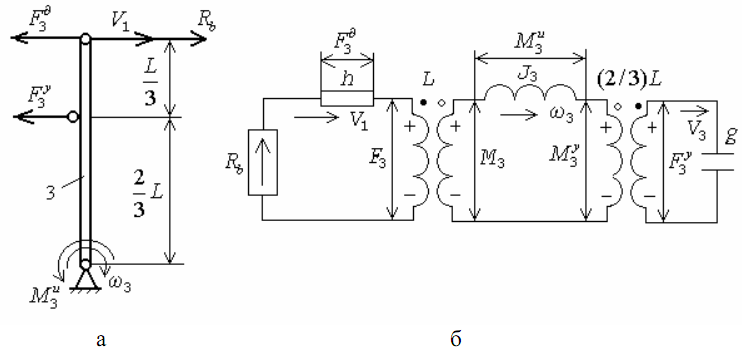
Рис. 6.15. Подсистема 3:
а – кинематическая схема, б – электрическая схема
Запишем уравнение равновесия моментов, действующих на звено 3:
![]() (6.6)
(6.6)
Где
![]()
![]() ,где,
в свою очередь,
,где,
в свою очередь,
![]() .
.
Последние уравнения использованы для построения эквивалентной электрической схемы (рис. 6.15, б). Содержащиеся в ней трансформаторы осуществляют операции умножения. Далее объединяем отдельные электрические схемы в единую